Unconventional Space Robots – Robohub
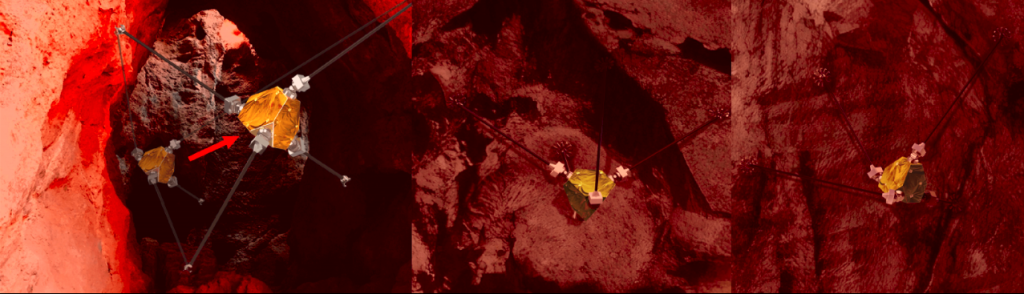
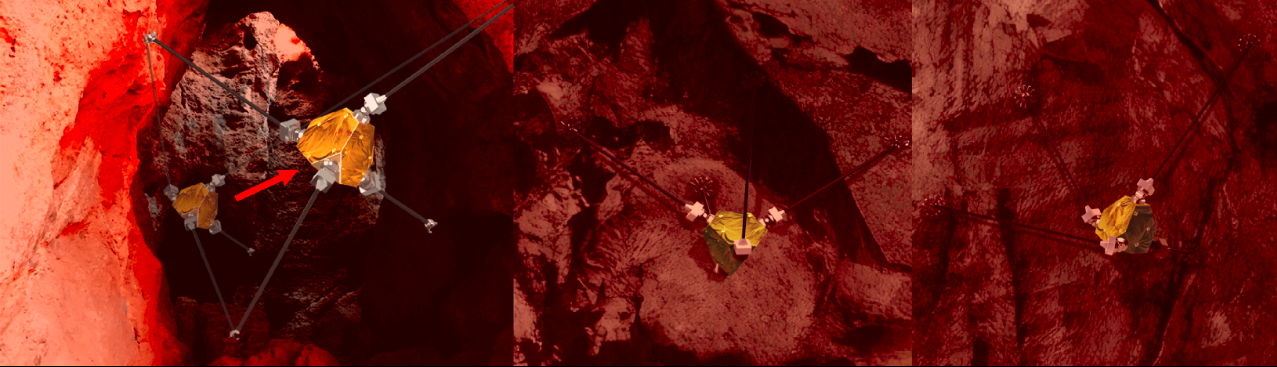
Credits: Marco Pavone
Lilly interviews Stephanie Schneider, a PhD candidate at Stanford working on unconventional space robotics. Schneider explains her work on Reachbot, a long-reach crawling and anchoring robot, which repurposes extendable booms for mobile manipulation. They discuss the challenges and exciting elements of robotic prototyping for low-gravity or otherwise unique environments.
https://youtu.be/0RqFgOHqz7E

Stephanie Schneider
Stephanie Schneider is a Ph.D. candidate in Aeronautics and Astronautics in the Autonomous Systems Laboratory at Stanford, working with Professor Marco Pavone. She received her BS in Mechanical Engineering from Cornell University in 2014. Stephanie’s research interests include real-time spacecraft motion-planning, grasping and manipulation in space, and adaptive control for autonomous robotics.
Links
tags: Actuation, c-Space, cx-Space, Manipulation, NIAC, podcast, Prototype, Research, robot, space, Stanford

Lilly Clark
Credit: Source link
Comments are closed.