Researchers Develop Parking Analytics Framework Using Deep Learning
This research summary article is based on the paper 'Parking Analytics Framework using Deep Learning' Please don't forget to join our ML Subreddit
Artificial Intelligence and deep learning in video analytics are gaining popularity. It has enabled a wide range of industrial applications, including surveillance and public safety, robotics perception, medical intervention, and facial recognition. According to Markets & Markets, the global market for video analytics was valued at USD 5.9 billion in 2021 and is predicted to reach USD 14.9 billion by 2026.
Unmanned aerial vehicles (UAVs) have also enabled a wide range of video analytics applications (e.g., aerial surveys) since they provide aerial views of the environment, allowing for collecting aerial photos and processing with deep learning algorithms. Parking analytics is one of these critical smart city applications that uses deep learning and UAVs to collect real-time data and analyze it in order to maximize parking revenue, enhance parking resource allocations, and better manage public space.
Authorities face a huge issue in managing parking facilities in urban development. As a city grows in population, the number of automobiles on the road grows, and parking spaces become scarce. Unwanted consequences result from poor parking resource management. According to reports, Americans spend $73 billion a year looking for parking. Naturally, this results in increased traffic congestion, fuel consumption, accident risks, and driver irritation.
Furthermore, in congested areas such as shopping malls, drivers tend to park as close to the entry gates as possible, causing more load and traffic at specific parking spaces than at others. For this reason, parking analytics solutions that allow for the analysis of parking slot occupancy levels for better administration and operation are needed.
Researchers from Prince Sultan University in Riyadh recently published a paper that looks at the topic of real-time parking monitoring and data gathering using UAVs, assessing parking occupancy over time using deep learning for improved management and resource allocation. The contribution of this research is the creation of an AI-based solution that analyses parking occupancy using aerial photos of automobiles and combines YoloV3 object detection with DeepSort object tracker.
The concept is to use YoloV3 and DeepSort to process the video stream and output a log file with statistical data on the parking occupancy in each batch of frames. The log file is then processed with data analytics tools to extract parking areas occupancy information, such as parking slot occupancy heatmaps, the number of occupied slots over time, and the number of cars in each slot.
The suggested parking analytics approach consists of three building modules: (i) object identification, (ii) object tracking, and (iii) statistical log file module. The initial module is the vehicle detection block, which employs the YOLOv3 object detector. The second module is the vehicle tracking block, which employs the Deep SORT algorithm.
The third module involves the manual recording of the polygon coordinates of the parking slots and the use of the ray-tracing technique to determine whether or not every tracked car is present in any given parking slot. To generate a statistical insight into the parking, all of the data will be captured and recorded in a log file.
The team needed to employ a multi-object tracking algorithm to detect every circulating vehicle within the image, and they used Deep SORT. This cutting-edge algorithm can easily be coupled with any object detector to quickly recognize the vehicle’s identity in the video. The Deep SORT algorithm takes all of the detected vehicles by YOLO v3 and assigns the right ID to each of them for each frame. Deep SORT will assign a new ID to the vehicle if it has never been observed before in the scene.
The Point In Polygon problem is a computational geometry term for determining whether a certain point is within a closed polygon (PIP). One of the most popular techniques for solving this problem is the Ray Tracing algorithm. The concept is to go through two steps. The first step is to draw a ray that starts at the chosen spot and points in a random direction. The next step is to count how many times this ray intersects with the polygon’s edges. The point is outside the polygon if it is even. Otherwise, it is contained within it.
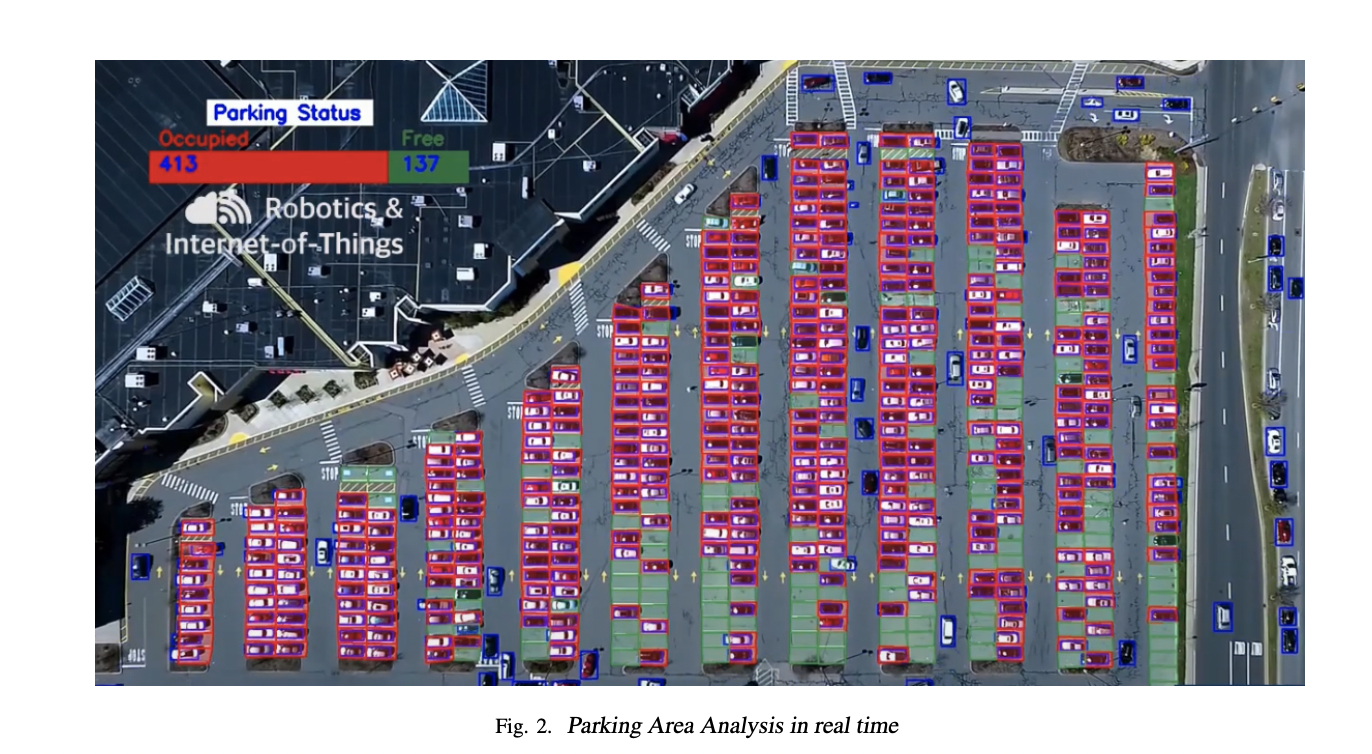
The results of the testing show that YOLO v3 detects every vehicle circulating in the region and assigns an ID to it using Deep SORT. Then If possible, researchers assign each vehicle to the appropriate parking spot. They have a two-dimensional array for each frame that describes two values for each parking spot ID. The first value is the occupancy status, which is either occupied or unoccupied. Researchers placed a status bar on the front to better predict the parking occupancy status. The number of occupied slots is displayed in the red area of the bar, while the number of unoccupied slots is displayed in the green area.
Conclusion
This research offered a way for better analyzing and managing parking lots using Deep Learning and Image Processing. The researchers began by emphasizing the significance of this topic in today’s cities. The solution can help with a variety of issues relating to parking lot management, such as parking lot space management, avoiding parking lot misuse and long-term vehicles, and designing parking lot parking slots. Nonetheless, by working on randomly oriented camera viewpoints, the efforts can be improved. The technique can also be used to target partially occluded parking spaces or covered parking slots.
Paper: https://arxiv.org/pdf/2203.07792.pdf
Suggested
Credit: Source link
Comments are closed.