The University of Maryland Researchers Introduce a Novel Method, Called TERP, for Reliable Robot Navigation in Uneven Outdoor Terrains Using Deep Reinforcement Learning (DRL)
This Article is written as a summay by Marktechpost Staff based on the paper 'TERP: Reliable Planning in Uneven Outdoor Environments using Deep Reinforcement Learning'. All Credit For This Research Goes To The Researchers of This Project. Check out the paper and post. Please Don't Forget To Join Our ML Subreddit
Autonomous mobile robots are being used more and more in the real world for things like indoor and outdoor surveillance, search and rescue, exploring planets and space, extensive agricultural surveys, etc. For each of these uses, the robot needs to be able to work on different types of terrain, which can be described by things like color and texture and things like changes in elevation, slope, etc.

The unevenness and slope of the ground mainly determine a robot’s stability, which means that its pitch and roll angles must stay within certain limits. For reliable navigation, robots need to recognize unsafe changes in elevation and plan most of their paths along with flat areas. But sensing and navigating in uneven, unstructured environments can be challenging because a complete terrain model with all the elevation information is not available. Instead, this information is gathered as the robot moves with cameras or LiDAR sensors. Also, one can’t tell enough about changes in elevation from what you can see in the environment. In the past, the problem has been solved with grid-based data structures like Octomaps and elevation maps, which are 2D grids that show the highest point (in meters) at each grid.
Self-driving mobile robots are already being tested and used for things like delivering packages, surveillance, search-and-rescue missions, exploring planets and space, and keeping an eye on the environment. For these robots to do their jobs well, they need to be able to work safely and reliably on uneven outdoor terrains without running into things.

Researchers recently came up with a new machine learning method that could make it easier for robots to move around uneven outdoor terrain and obstacles. Before the researchers’ work, students started working on their robot navigation method; they studied how people move around in complex outdoor environments. They found it interesting that people ignore the whole environment when they move. Instead, they focus on parts of space they think are critical or essential.
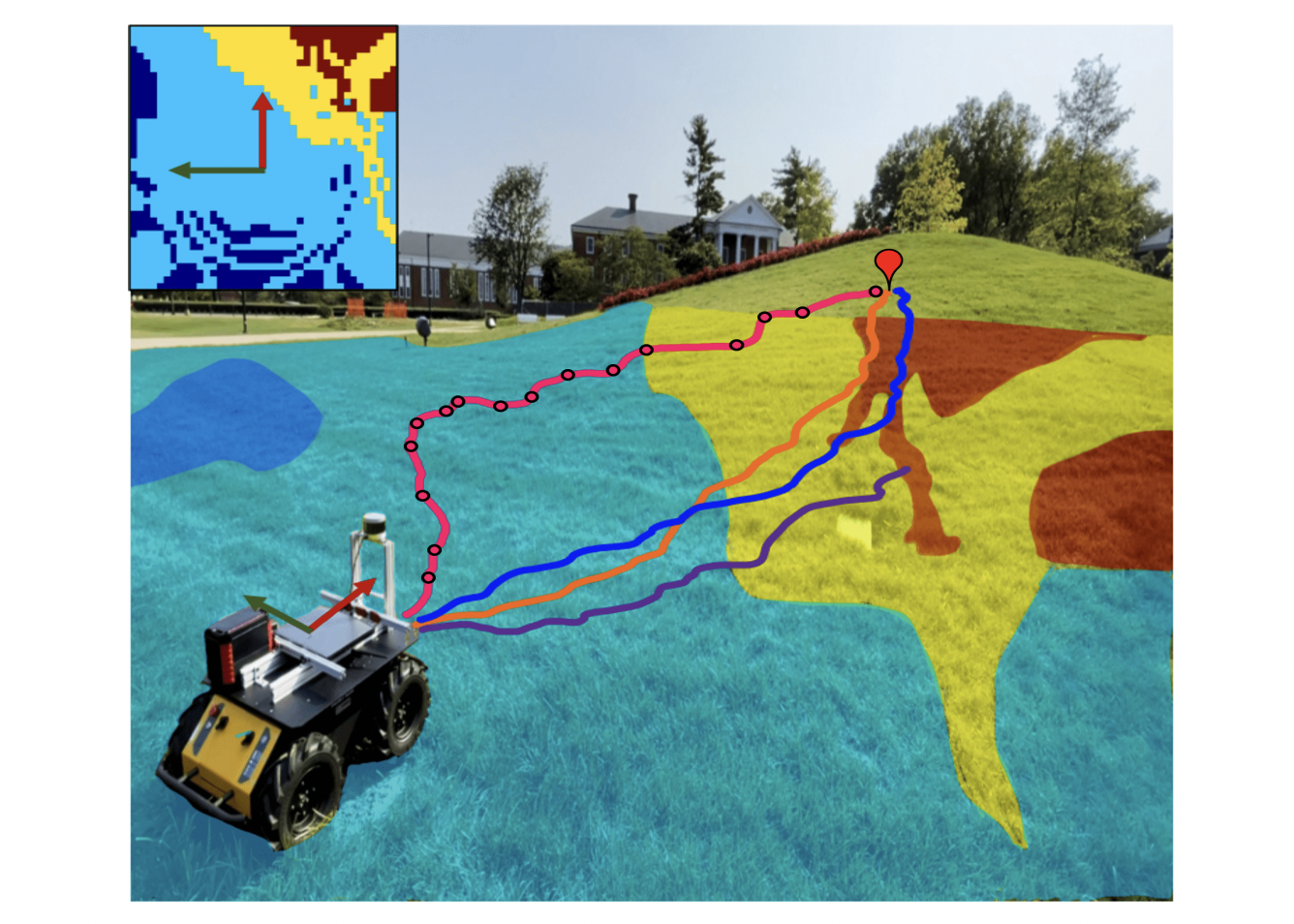
The way people walk helped develop a way for robots to find their way around. This method, TERP (Terrain Elevation-based Robot Path planning), is based on a technique they created called deep reinforcement learning (DRL).
The new hybrid machine learning architecture combines intermediate output results from attention-based DRL networks with a new trajectory planning method. These intermediate results help find and avoid places in the hard or dangerous environments to navigate. The technique uses a fully trained DRL network that uses elevation maps, the robot’s pose, and its goal as inputs to figure out an attention mask.
The attention mask made by the team’s algorithm then tells a mobile robot where in its environment it needs to pay special attention so it can move around without getting lost. This mask is added to the input elevation map at the end of the process to make a 2D navigation cost map. Then, this map is used to plot a safe and reliable path for the robot to take to get to a specific place.
In previous work, a significant drop in performance was seen in end-to-end DRL methods when moving from simulation to real-world terrains. However, with the new hybrid machine learning architecture, navigation works better.
The attention part of TERP can improve a robot’s sense of space by directing its attention to the most critical areas for the navigation task at hand. The waypoint planner part of their method, on the other hand, makes sure that the robot is taking the most cost-effective path to get to its destination.
TERP creates relatively stable paths in steep terrain to reduce the risk of robot flip-overs. It can also avoid dangerous areas and obstacles when moving through complex terrains with both fixed and moving obstacles.
Researchers used the Husky robot, an unmanned mobile robotic system made by Clearpath Robotics, to test their method in different real-world settings. During their tests, the robots moved through uneven outdoor spaces with a change of up to 4 meters.
It was shown that the unique hybrid formulation with an attention DRL network for perception and a waypoint planner for navigation leads to a high navigation success rate on complex terrains. This means that the method makes it much less likely that a robot will flip over on rugged, uneven terrain.
TERP did very well in the team’s first tests, which suggests that it can significantly improve the reliability of robot navigation in challenging outdoor environments. It could be used in the future to make robots work better in many different situations. For example, it could open up new ways to explore planets and space, do agricultural surveys, and keep a close eye on the environment.
In addition to the terrain’s height, surface properties like texture, bumpiness, and deformability also affect a robot’s ability to move around in complex outdoor situations. Work is going on for robots to learn independently in these situations. Moreover, more methods are being added so that robots with legs, like the Boston Dynamics Spot robot, can move around independently.
Credit: Source link
Comments are closed.