In A Latest Computer Vision Research, Researchers Propose ShAPO; An End-To-End Method For Joint Multi-Object Detection, 3D Textured Reconstruction, 6D Object Pose, And Size Estimation
The interpretation of a holistic 3D object from a single RGB-D observation has remained a popular but difficult subject in robotics and computer vision. Robotic manipulation, navigation, and augmented reality can all benefit from the capacity to infer entire object-centric 3D scene knowledge. For this job, the autonomous robot must estimate the appearance of unique item instances, deduce a 3D form and 6D posture and size from partially seen single-view visual data, and reason about the 3D geometry of objects.
Despite recent advancements, this problem is still difficult to solve because it is difficult to infer 3D shape from photos and because forecasting the 6D position and 3D scale without knowing anything about the items of interest beforehand can be exceedingly unclear. Earlier works on object-centric scene understanding have made numerous attempts to address this issue. Methods for understanding the pose of an object rely on 3D bounding box data rather than shape information. The majority of earlier efforts on object position estimation framed it as a job for comprehending 3D objects at the instance level rather than the category level.
These techniques, while producing amazing results, rely on 3D reconstructions or earlier CAD models for accurate pose estimation and identification. On the other hand, category-level techniques are substantially more difficult because they rely on learnt shape and size priors during training. Despite significant advancements in category-level pose estimation, the inability of these techniques to directly convey shape variations has had a negative impact on their performance. Scene reconstruction techniques that are object-centric recover object shapes from 2D or incomplete 3D data. However, the majority of techniques have limitations when it comes to quickly reconstructing high-quality designs.
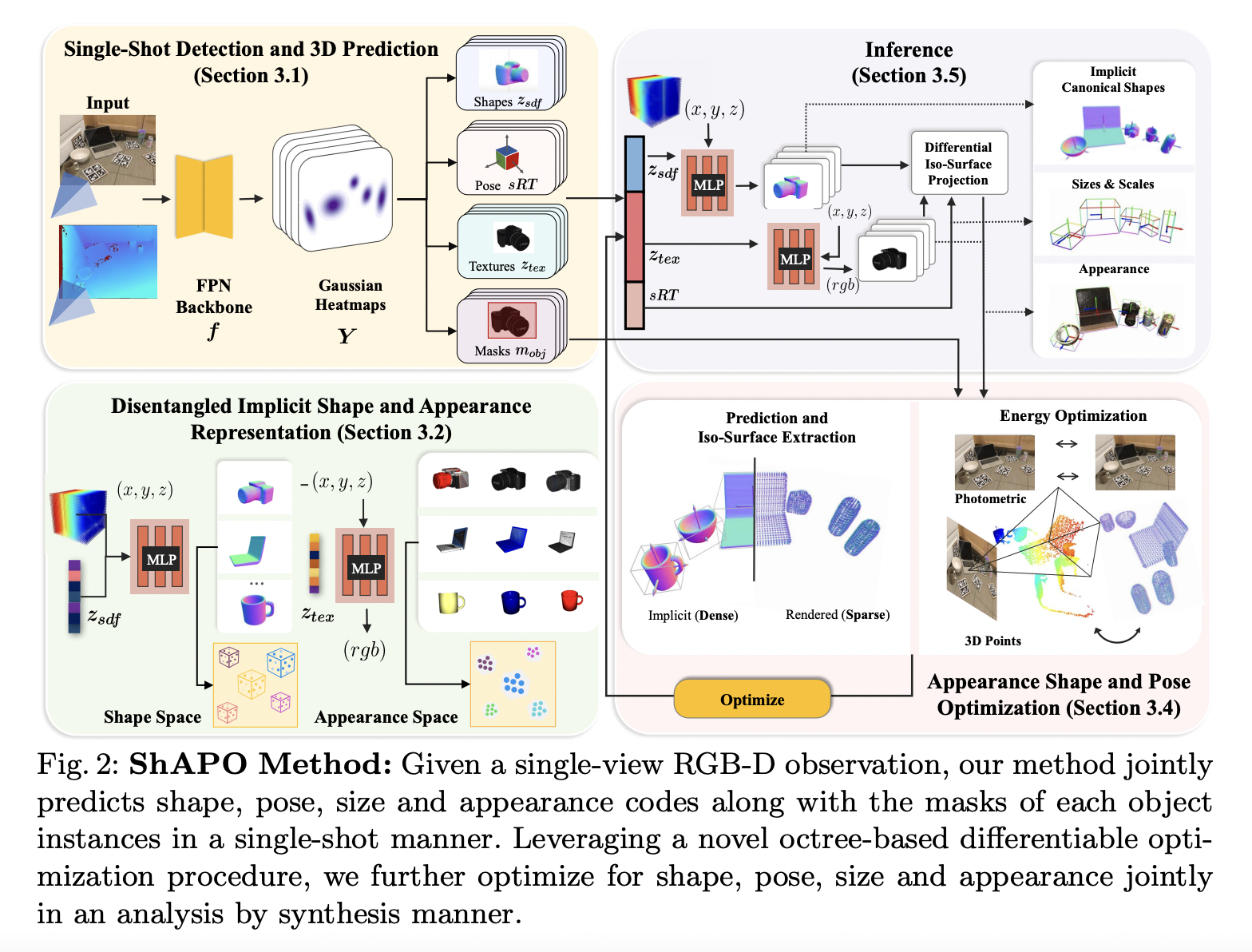
ShAPO: Implicit Representations for Multi-Object Form, Appearance, and Pose Optimization, a teachable technique combining precise shape prediction and alignment with object-centric scene context, was developed by researchers at Toyota Research Institute in response to the foregoing. From a single-view RGB-D observation, researchers can deduce the whole 3D information of fresh object instances. The approach represents individual object instances as spatial 2D grid’s center key-points. At each item’s spatial center point, researchers regressed all available 3D information, including object shape and appearance codes, object masks, and 6D posture and sizes. On the NOCS benchmark, the proposed approach considerably outperforms all baselines for 6D pose and size estimates, exhibiting an improvement of over 8% in absolute performance for 6D pose.
Conclusion
ShAPO is an end-to-end approach for joint multi-object recognition, 3D textured reconstruction, 6D object posture, and size estimate that was recently proposed by researchers at the Toyota Research Institute. Without using the ground truth 3D meshes of the novel objects, the approach can detect and recreate them. Researchers developed a novel, generalizable shape and appearance space that produces precise textured 3D reconstructions of things in the wild in order to make this easier. To reduce the cost and time needed to create high-quality 3D textured assets, the team will investigate in future work how the proposed technology might be utilized to build object databases in new environments. Extensions to multi-view settings and integration with SLAM pipelines for joint camera motion and object pose, shape, and texture estimates in static and dynamic environments make up a second area of future research.
This Article is written as a research summary article by Marktechpost Staff based on the research paper 'ShAPO: Implicit Representations for Multi-Object Shape, Appearance, and Pose Optimization'. All Credit For This Research Goes To Researchers on This Project. Check out the paper, github link and project page. Please Don't Forget To Join Our ML Subreddit
![]()
Nitish is a computer science undergraduate with keen interest in the field of deep learning. He has done various projects related to deep learning and closely follows the new advancements taking place in the field.
Credit: Source link
Comments are closed.