In a Latest Computer Vision Research, Alibaba Researchers Develop ‘EPro-PnP’ for Monocular 3D Object Detection in Driving Scenes
In computer vision, determining the posture of 3D objects from a single RGB image is crucial. This field is frequently separated into several tasks, such as 3D object identification for autonomous vehicles and 6DoF position estimation for robot handling. Despite the fact that the basics of pose estimation are the same, the varied characteristics of the data result in biased technique selection. Direct 4DoF posture prediction, utilizing the advancements in deep end-to-end learning, is the technique used by top performers on the 3D object detection benchmarks.
On the other hand, geometry-based approaches, which take advantage of the available 3D object models and achieve a consistent generalization performance, predominate in the 6DoF posture estimation benchmark. Combining the best of both worlds, or training a geometric model to learn the object stance from beginning to end, is fairly difficult.
An end-to-end framework built on the Perspective-n-Points (PnP) method has recently been proposed. The difficulty of creating these correspondences is left unsolved by the PnP algorithm, which solves the pose from a set of points in 3D space and their corresponding 2D projections in picture space. By using the geometric prior to creating surrogate loss functions, vanilla correspondence learning forces the network to learn a set of predefined correspondences.
Although other components are assumed to be known a priori, current work on differentiable PnP learns only a fraction of the correspondences. Why not study the full set of points and weights end-to-end is a crucial question that is raised by this. The short explanation is that training and convergence problems result from the PnP problem’s inherent non-differentiability in some places. A PnP issue, for instance, may have unclear remedies.
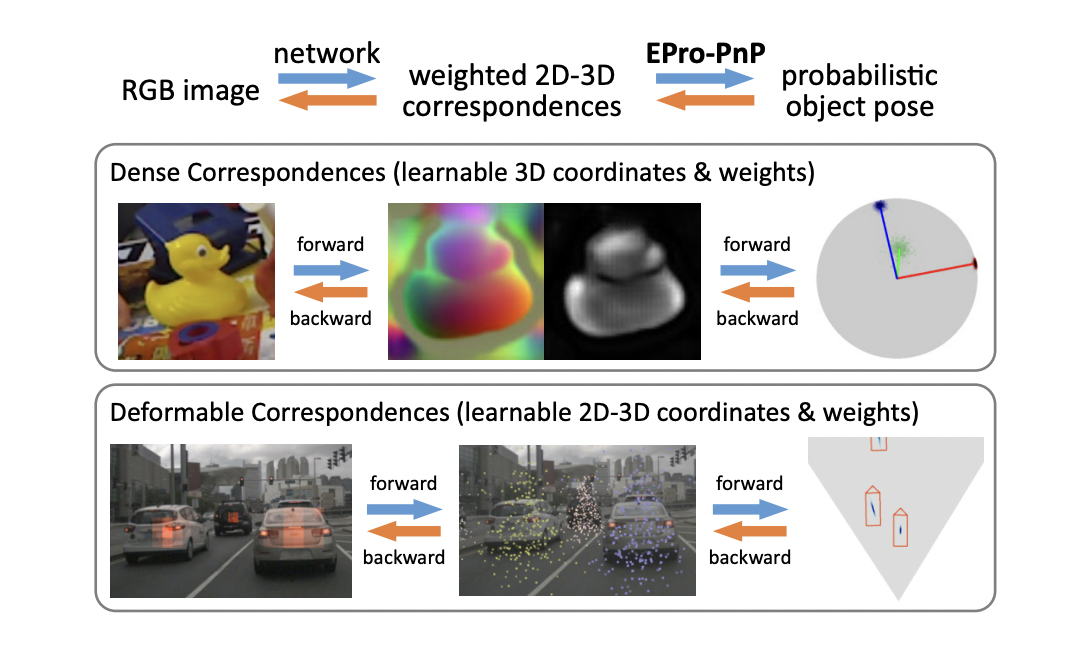
Alibaba researchers developed a generalized end-to-end probabilistic PnP (EPro-PnP) approach that permits learning the weighted 2D-3D point correspondences totally from scratch in order to get over the aforementioned restrictions. The fundamental principle is simple: while a deterministic position is not differentiable, the probability density of the pose appears to be differentiable, exactly like the scores for categorical classification. Because of this, the group understood PnP’s output to be a probabilistic distribution parameterized by learnable 2D-3D correspondences. The Adaptive Multiple Importance Sampling approaches may effectively apply the Kullback-Leibler (KL) divergence between the predicted and target pose distributions as the loss function during training.
Techniques for learning correspondence are already unified by EPro-PnP. Furthermore, the corresponding weights can be trained to automatically focus on crucial point pairs, precisely like the attention mechanism, allowing the networks to be created using ideas from attention-related research. Researchers showed that by merely integrating EPro-PnP into the CDPN framework, it is capable of achieving top-tier performance for 6DoF pose estimation. By suggesting deformable correspondence learning for precise 3D object detection, where the complete 2D-3D correspondences are learned from scratch, the researchers showed the adaptability of EPro-PnP.
Conclusion
The EPro-PnP, which transforms the non-differentiable deterministic PnP operation into a differentiable probabilistic layer to enable end-to-end 2D-3D correspondence learning with unprecedented flexibility, was recently proposed by Alibaba researchers in a publication. It has been thoroughly addressed how the ties to earlier work are supported by both theoretical and experimental evidence. EPro-PnP can be applied in new ways, such as the deformable correspondence, or it can be merely included in already-existing PnP-based networks. The fundamental ideas might theoretically be used in other learning models with a hierarchical optimization layer, and declarative networks, in addition to the PnP problem.
This Article is written as a research summary article by Marktechpost Staff based on the research paper 'EPro-PnP: Generalized End-to-End Probabilistic Perspective-n-Points for Monocular Object Pose Estimation'. All Credit For This Research Goes To Researchers on This Project. Check out the paper and github link. Please Don't Forget To Join Our ML Subreddit
![]()
Nitish is a computer science undergraduate with keen interest in the field of deep learning. He has done various projects related to deep learning and closely follows the new advancements taking place in the field.
Credit: Source link
Comments are closed.