Latest AI Paper From Google Introduces A Large Scale Imitation Learning Framework For Producing Real-Time, Open Vocabulary Language-Conditionable Robots
One of the most long-standing goals of AI has been to make a robot that can follow a diverse array of Natural language instructions. Though recent research is quite abundant in this field, very few, have been able to produce a robot that is present in the real world and can follow a wide variety of instructions. We are interested in the ability to obey directions given in interactive Language, which entails that the robot can respond skillfully and immediately to new natural language instructions given during current task performance.
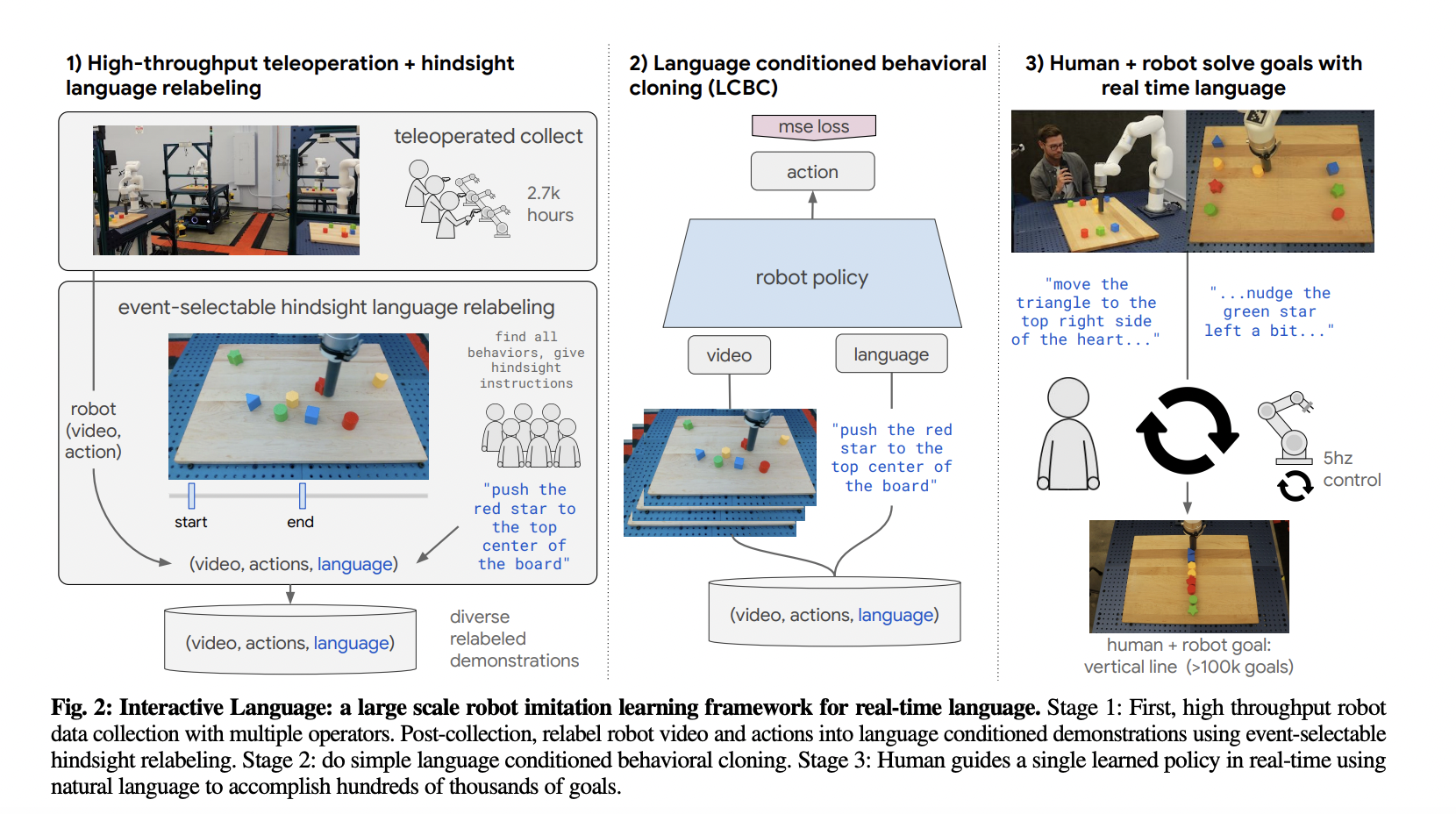
Recently, researchers at Google research showed a method for creating real-world, real-time-interactive, natural-language-instructable robots that, according to some metrics, operate at a scale that is an order of magnitude larger than previous works.

This robot operates in a setting that the researchers created to present a manageable yet challenging level of action (pixel-based perception, feedback-rich control, a variety of objects, and confusing natural language commands). They framed real-time linguistic guidance as a significant issue with imitation learning.
They demonstrated that the robot could perform intricate long-horizon rearrangements, such as “place the blocks into a happy face with green eyes” (see the figures), which call for many minutes of deftly coordinated handling and only occasionally require human natural-language feedback.
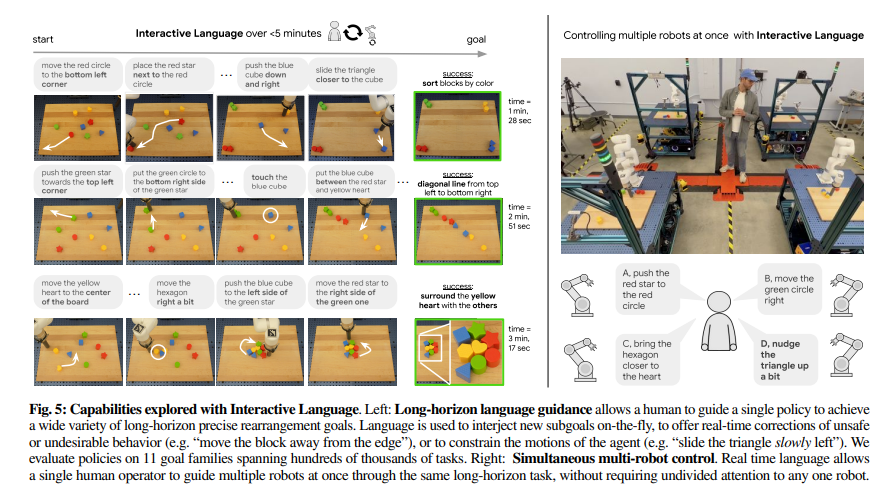
They also discovered that real-time language proficiency opens the door to additional skills like simultaneous, multi-robot instruction, in which one real-time robot can instruct several others in long-horizon activities.
Interactive Language provides preliminary evidence that large-scale imitation learning can indeed create real-time interactable robots that obey freeform end-user orders, even though it is now restricted to a tabletop with a fixed collection of objects.
Although straightforward and adaptable, their strategy has a few drawbacks. In general, there are several outstanding issues in human-robot collaboration, such as intention detection, non-verbal communication, physically collaborating on tasks, etc. Their strategy focuses solely on real-time language-guided manipulation. Future research may examine how Interactive Language can be used to significant domains like real-time assistive robots, which may benefit from more powerful natural language interfaces.
Check out the Paper, Project, and Google Blog. All Credit For This Research Goes To Researchers on This Project. Also, don’t forget to join our Reddit page and discord channel, where we share the latest AI research news, cool AI projects, and more.
![]()
Rishabh Jain, is a consulting intern at MarktechPost. He is currently pursuing B.tech in computer sciences from IIIT, Hyderabad. He is a Machine Learning enthusiast and has keen interest in Statistical Methods in artificial intelligence and Data analytics. He is passionate about developing better algorithms for AI.
Credit: Source link
Comments are closed.