This AI Paper Introduces An Event-Based Vehicle Detection Framework And A Tracking Dataset
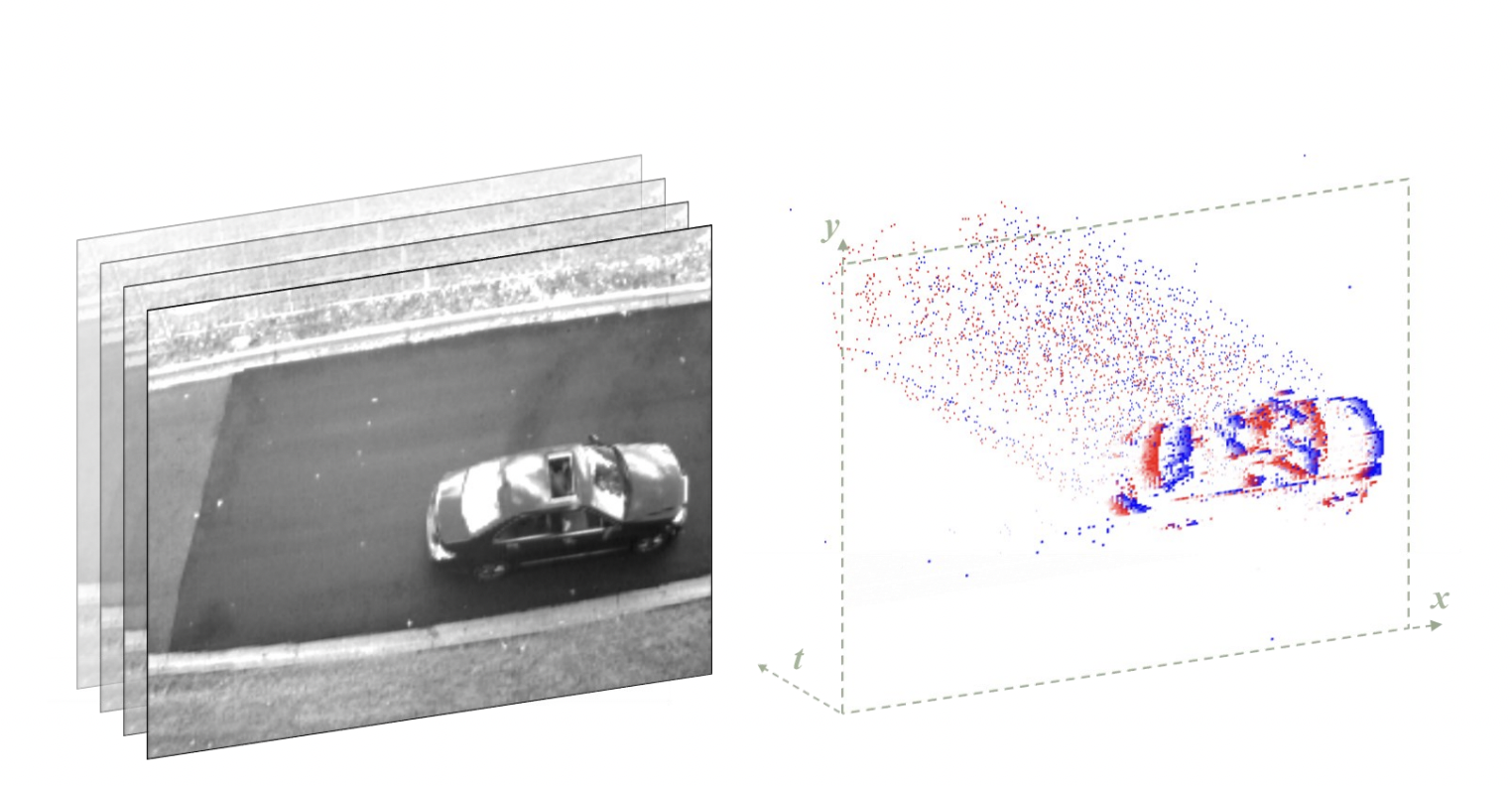
Neuromorphic event-based vision is a growing field that involves using event cameras, which capture brightness changes independently at each pixel rather than recording color intensity at a fixed rate like traditional frame-based cameras. These event cameras, also known as event-based sensors, were first introduced in 2008 and offered distinct advantages over frame-based cameras. Event cameras capture brightness changes, or events, asynchronously and independently at each pixel. Each event includes the time it was detected, its pixel coordinates, and the type of brightness change registered. This allows event cameras to capture changes in a scene, often resembling motion, at the time of their occurrence and to have a high temporal resolution and low latency. In contrast, traditional frame-based cameras capture images at a fixed rate and may produce redundant data in stationary scenes. These characteristics make event cameras attractive for various applications, including motion deblurring and object detection.
Event cameras, also known as event-based sensors, capture brightness changes in a scene asynchronously and independently at each pixel. These sensors have a high temporal resolution, low latency, and a high dynamic range, making them suitable for various applications such as motion deblurring and object detection. However, event cameras may be less effective in scenes with limited motion, where there is a need for visual signals to utilize this modality reliably. In such scenarios, event-based implementations may be unreliable. Despite this, the potential of event-based vision is significant. It can provide optimal benefits when combined with frame-based vision, as both modalities can complement each other when used correctly. This can enable a more robust perception performance for automated systems. Current works have used event cameras in various applications, including high-framerate HDR video synthesis and image reconstruction from events.
In this work, the authors investigate a hybrid approach that combines frame-based and event-based data for object detection and tracking tasks. Object detection involves identifying the presence and location of objects in an image, while object tracking consists of following things’ movement over time. Both of these tasks are important for automated systems to understand and interpret their surroundings, and they have various applications in robotics, such as traffic monitoring, surveillance, and autonomous vehicles. Object detection performance can vary depending on the method used, and some approaches may have trade-offs between accuracy and latency. The authors propose using event-based data to improve the performance of a deep neural network-based object detector in certain scenarios. The authors aim to improve the overall object-tracking performance by combining the strengths of both frame-based and event-based data.
This paper presents a hybrid approach for object detection and tracking using both frame- and event-based data. The goal is to improve the overall object-tracking performance by leveraging the strengths of both modalities. The fixed framerate of the input source can limit conventional object detection and tracking methods using frame-based data. They may require stringent hardware to achieve real-time performance. The authors propose three methods to improve object detection and tracking using event-based techniques:
- They improve the precision of bounding boxes presented by frame-based object detectors using a combination of event data and classical computer vision methods.
- They enhance the robustness and consistency of frame-based object detectors using event-based detection methods. This method is initiated when the frame-based object detector fails to detect an object in a given frame, improving the object detection reliability and the corresponding tracking performance using high-temporal-resolution event data.
- They numerically assess the effects of these methods using a fully labeled dataset and state-of-the-art multi-object tracking metrics.
They also compare the computational cost of the event-based methods to the frame-based components.
The authors propose three methods to improve object detection and tracking using event-based data. First, they present an event-based bounding box refinement method for static scenes and an event-based method for recovering hidden objects in the frame domain. Second, they offer an ablation study to quantitatively verify the benefits of each introduced event-based method and their optimal combination using the HOTA metric. Third, they provide a computational latency analysis for the introduced methods and the proposed system’s core components. Finally, they perform a real-world validation experiment using a high-speed LiDAR to evaluate how well the presented framework, including the additional event-based methods, estimates the vehicle position at different temporal resolutions and tracking rates. The main contributions of this paper are the improvement of object detection and tracking performance using event-based data, a quantitative analysis of the benefits of the event-based methods, and computational latency analysis.
Check out the Paper and Page. All Credit For This Research Goes To the Researchers on This Project. Also, don’t forget to join our Reddit page and discord channel, where we share the latest AI research news, cool AI projects, and more.
![]()
Aneesh Tickoo is a consulting intern at MarktechPost. He is currently pursuing his undergraduate degree in Data Science and Artificial Intelligence from the Indian Institute of Technology(IIT), Bhilai. He spends most of his time working on projects aimed at harnessing the power of machine learning. His research interest is image processing and is passionate about building solutions around it. He loves to connect with people and collaborate on interesting projects.
Credit: Source link
Comments are closed.