PAL Robotics launches SOLO 12 quadruped platform
|
Listen to this article  |

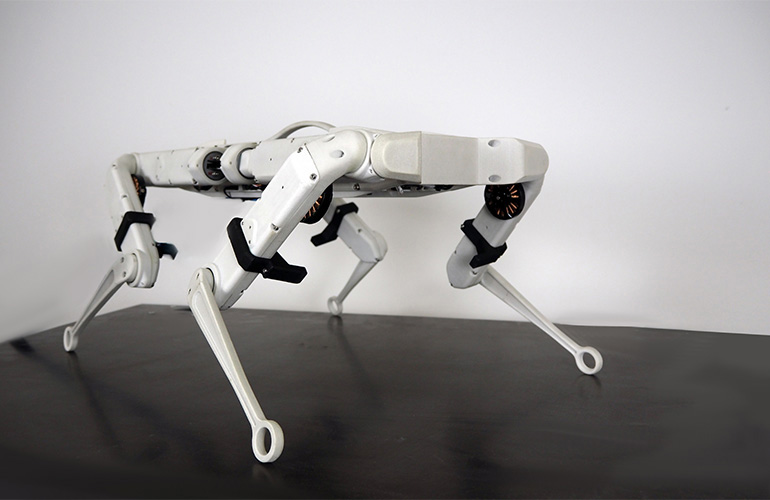
PAL Robotics’ SOLO 12 advanced quadruped platform. | Source: PAL Robotics
PAL Robotics, a developer of mobile robots, has announced the launch of its SOLO 12 advanced quadruped platform. The company aims for the platform to be an accessible, affordable, and modular locomotion platform for research and testing. It is available both as a fully assembled robot and in a kit form.
The 2.5 kg (5.5 lb) quadruped is made from 12 identical actuator modules and four lower legs with foot contact sensors. The SOLO 12 can perform dynamic tricks, like jumping waist high or landing on its feet after falling over, making it ideal for research purposes. Researchers can test complex algorithms rapidly with the platform, speeding up research.
The platform makes research in areas like exploring animal-based limb movement and movement over laboratory surfaces, like gravel, soil, sand, mud, and other terrains, reinforcement learning for complex and dynamic behaviors, very dynamic locomotion, manipulation of the environment, and more.
The kit version of the SOLO 12 allows users to enjoy the experience of building their own quadruped robot with a single procurement procedure from a single supplier. The SOLO 12 KIT comes with all of the necessary parts to assemble the quadruped, including:
- One SOLO 12 quadruped 12DoF robot assemble
- One SOLO 12 calibration tooling kit
- One SOLO 12 master board programmer
- One SOLO 12 micro driver programmer
- One SOLO 12 bonding tooling kit
The quadruped was developed in collaboration with the Open Dynamic Robot Initiative with the goal of creating an open-sourced quadruped platform that can further promote robotics learning for researchers and students. The project started in 2016 in response to there being a low number of affordable advanced robotic platforms for learning available.
The initial work was done in collaboration between the Motion Generation and Control Group, the Dynamic Locomotion Group, the Robotics Central Scientific Facility at the Max-Planck Institute for Intelligent Systems, the Machines in Motion Laboratory at New York University‘s Tandon School of Engineering, and the Gepetto Team at the LAAS/CNRS. It was then acquired by PAL Robotics with the intention of reinvesting in the community for further development of open-source projects.
Credit: Source link
Comments are closed.