Robotic Grasping and Manipulation Competition expands tracks in ninth annual session
|
Listen to this article  |

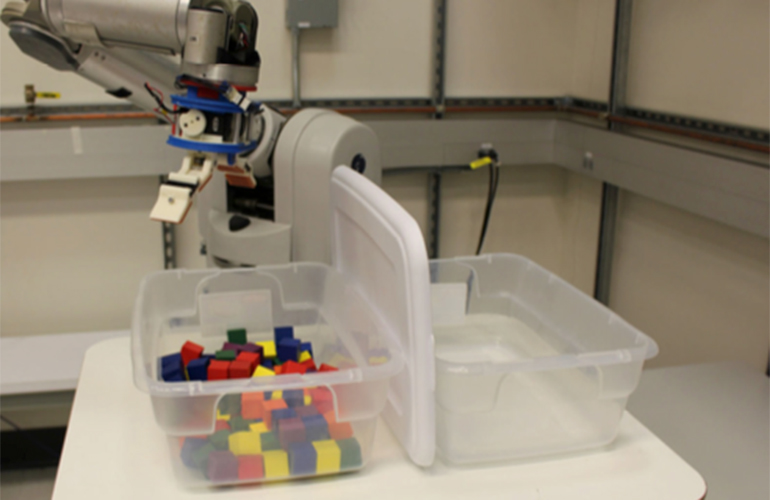
A robot prepares to pick individual blocks, one of the tasks in the Robotic Grasping and Manipulation Competition. | Source: RGMC
The Robotic Grasping and Manipulation Competition, or RGMC, is returning with new tracks and $20,000 in prize money for its ninth session. The prize money will be split between the tracks and their winners.
The competition is expanding its tracks this year to address the continued interest and growth needed for robot applications that can grasp and manipulate several different items. While robots are certainly picking objects in manufacturing facilities and warehouses in the real world, they’re typically better at reliably handling the same objects over and over, instead of a large variety of objects.
This year’s RGMC will take place at IEEE’s International Conference on Robotics and Automation (ICRA), which will take place in Yokohama, Japan, from May 13 to 15, 2024.
All of the teams competing in the competition in any rack will have access to MathWorks resources. These include software, perception, control templates, and technical assistance from MathWorks professionals.
ASTM International teams up with RGMC for Manufacturing track
ASTM International will be working with the National Institute of Standards and Technology (NIST) for the RGMC’s Manufacturing track. The organizations will use the industry-standard NIST Task Boards (NTB) for the challenge, which requires them to assemble and disassemble the board without human intervention.
“More companies are using robots to assemble and disassemble products,” said Aaron Prather, director for robotics and autonomous systems programs at ASTM, in a release. “These competitions allow students not only to develop marketable skills for future employment, but also start helping the industry evaluate different grasping methodologies and concepts while having the fun of competition.”
Prather added that the competition will help craft new performance standards for grasping and manipulation by presenting up to 10 different systems from 10 different teams to address a task.
“Sometimes, the student competitors don’t fully realize that they are contributing to standards development through these competitions,” he said. “But the competition organizers are setting up the parameters of the challenge using aspects of the potential standard to see if it is applicable. The students help us uncover our blind spots.”
In 2022, ASTM International established the F45.05 subcommittee on grasping and manipulation.
The winner of the Manufacturing track will take home $6,000 of the total $20,000 in prize money, and those who compete will also have access to travel reimbursement grants if they qualify.
 Submit your nominations for innovation awards in the 2024 RBR50 awards.
Submit your nominations for innovation awards in the 2024 RBR50 awards.
Essential Skills track expands with five new sub-tracks
This year, the Essential Skills track will have five sub-tracks. Competing teams can participate in as many sub-tracks as they want. The winners will be ranked individually for each sub-track, and prizes will be awarded based on the teams’ standings in each respective sub-track.
The sub-stacks are:
- Cloth manipulation: The teams will compete to localize optimal grasp points on hanging cloth items such as towels, shirts, and shorts.
- In-hand manipulation: This sub-track is focused on a robot’s ability to reconfigure objects in its hand. It includes any type of in-hand skills, like rolling, sliding, gaining, re-grasping, and manipulation with extrinsic dexterity. The challenge will focus on in-hand object repositioning, in-hand object reorienting and precise manipulation.
- Box and blocks: Teams competing in this sub-track will work on transferring uniform blocks from one box to another. The robot needs to pick each block individually.
- Picking in clutter: This sub-track involves a series of bin-picking tasks. The tasks will involve grasping heterogeneous known and novel objects in cluttered scenes.
- Human-to-robot handover: To succeed in this sub-track, teams will need to combine perception and control to complete efficient and smooth handovers between humans and robots. This requires the team to track the post of the object being handed over through vision so that they can effectively plan and reach the predicted handover location. The object will then be grasped and delivered to the desired location.

One of the sub-stacks in the Essential Skills track involves teams localizing optimal grasping points on handing cloth items. | Source: RGMC
Winners in the Essential Skills track will split $10,000 in prize money.
Those interested in the competition can visit RGMC’s website to learn more. The registration deadline is Jan. 20.
Credit: Source link
Comments are closed.