AI Researchers From Universidad Rey Juan Carlos, Spain Propose A New Method Of Contact Deformations Machine Learning For Real-Time Dynamic Simulation
This Article Is Based On The Research Paper 'Contact-Centric Deformation Learning'. All Credit For This Research Goes To The Researchers 👏👏👏 Please Don't Forget To Join Our ML Subreddit
The modeling of touch and deformations has piqued computer graphics’ interest since it allows computer-generated models of persons and their surroundings to come to life. Despite significant advances in the domain, scientists still struggle to replicate high-resolution contact at interactive speeds.
Many researchers are looking into ways to incorporate machine-learning approaches to model contact-driven deformations, inspired by their success in modeling self-driven deformations or deformations that occur due to an object’s motion. The methods developed so far learn rich nonlinear deformations as a function of the subspace state by using a subspace representation of the deformable object. However, the ML algorithms modeling contact deformation either simulate only smooth global contact responses or exhibit extremely restricted 3D interactions.
According to the researchers, the previously developed models have some limitations. Deformations are modeled in an object-centric way, which is a good choice for self-driven deformations since it is smooth with regard to the object’s subspace state, and machine learning achieves high generalization even from sparse data. Contact-driven deformations, on the other hand, are not smooth about the object’s state. Therefore machine learning of these deformations would necessitate intensive sampling of the object’s subspace state. This is problematic because the configuration space is huge and difficult to cover.
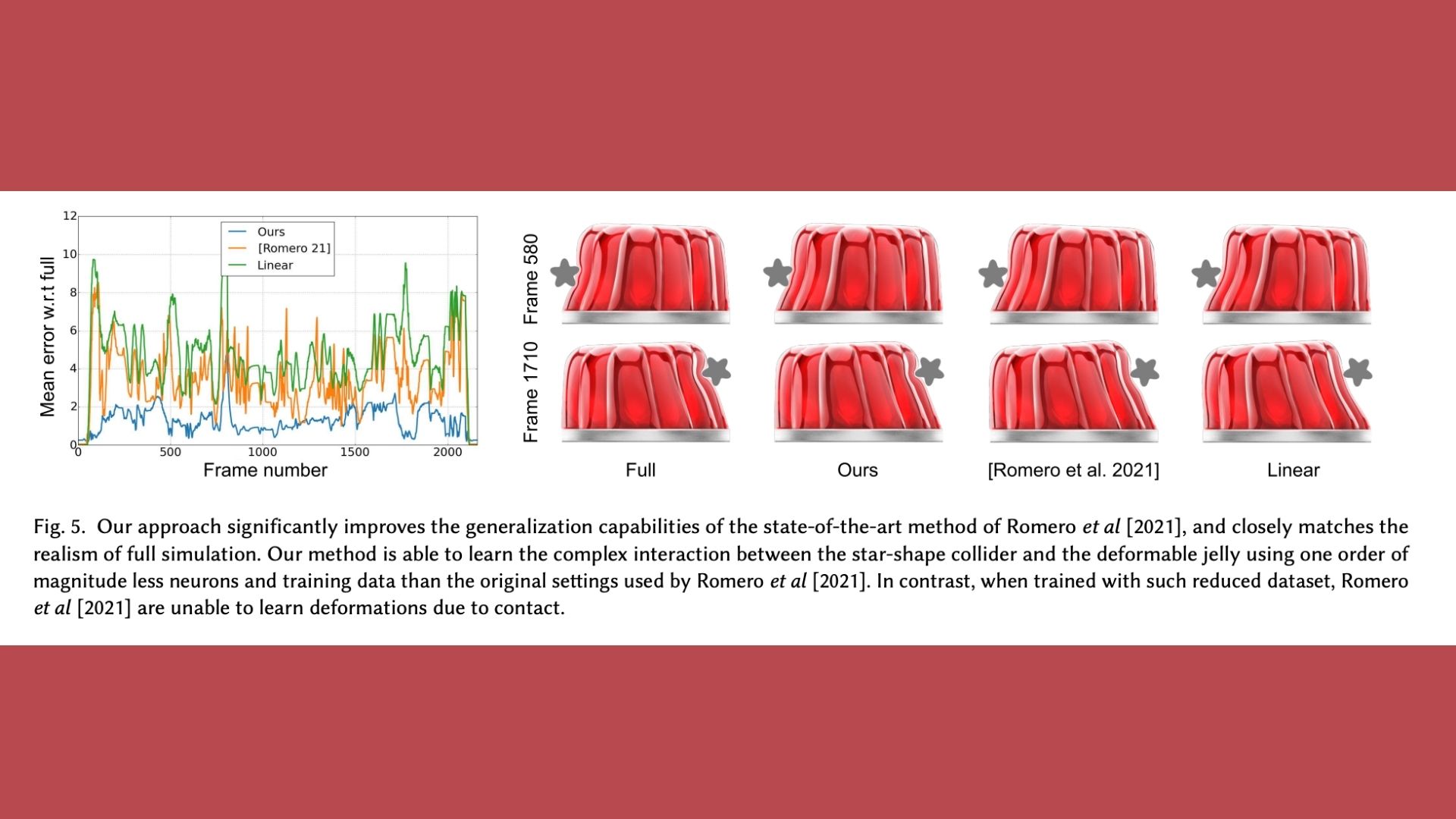
A new study by the researchers at Universidad Rey Juan Carlos and Meta Reality Labs presents a contact-centric technique for learning contact-driven deformations. The new approach published in the paper, “Contact-Centric Deformation Learning,” differs from earlier deformation-learning strategies, demonstrating excellent generalization in terms of the object’s subspace state.
The approach is based on three main components:
- Contact deformations are modeled in the contact-centric matter, which is based on a collider’s local reference. Because contact deformations are smoother when modeled in a contact-centric fashion, their findings suggest that this technique allows for better generalization and earlier and more accurate learning because contact deformations are smoother when modeled in a contact-centric fashion.
- The contact deformation field can be used to generalize continuity and differentiability to previously unknown configurations. Furthermore, the researchers considered contact deformations to be a continuous vector field. They learn the continuous field directly rather than learning a discrete approximation.
- The contact setup and the associated contact deformations have a sparse mapping. The localization of contact deformations can be used to learn them effectively from sparse data.
They combined a dynamic subspace deformation with quasi-static contact-driven detail expressed in the same subspace, resulting in quick and detailed simulations. They used the method for real-time dynamic simulations of various deformable objects. They demonstrate 2D and 3D subspace simulations and 3D simulations of the MANO hand model, constructed with bounded generalized biharmonic coordinates.
The present contact-centric modeling approach is being used to simulate deformable objects. However, the team states this approach could be useful for other object interaction challenges, such as joint monitoring of hands and objects or grip synthesis.
Paper: http://mslab.es/projects/ContactCentricLearning/contents/Romero_SIG2022_final.pdf
Github: http://mslab.es/projects/ContactCentricLearning/
References:
- http://mslab.es/projects/ContactCentricLearning/
- https://80.lv/articles/contact-deformations-machine-learning-for-real-time-dynamic-simulation/
Credit: Source link
Comments are closed.