BlueBotics takes AGVs and AMRs outside
|
Listen to this article  |
Swiss autonomous navigation leader BlueBotics has launched ANT everywhere, a new product extension for its industry-proven ANT navigation products that widen the scope of AGV and AMR operations by enabling effective outdoor operations.
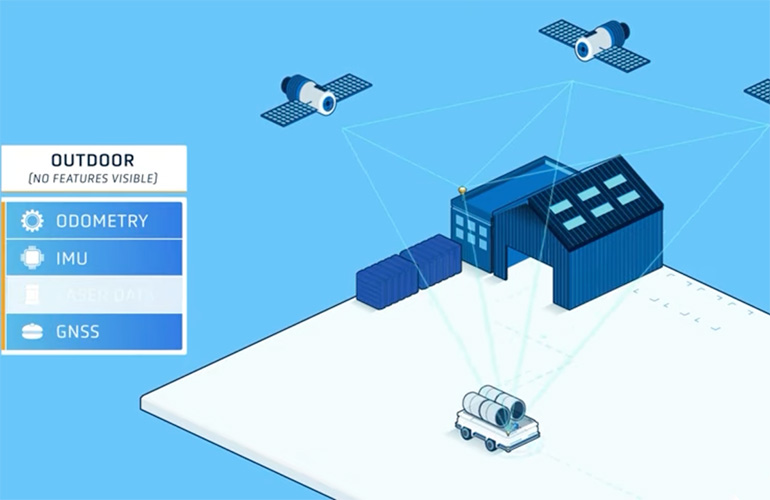
Outdoor use has traditionally been a challenge for producers of automated vehicles. This is because there are typically few permanent ‘features’ visible outdoors, which are required for modern mobile robots to calculate their exact position.
Up to now, vehicle producers have addressed this challenge either by using ad-hoc navigation add-ons, such as patching a GPS system on top of an existing navigation product or by adding additional outdoor infrastructure, such as custom poles featuring reflectors.
As a result, outdoor installations of AGVs and AMRs have often been highly customized (and therefore expensive), and more complex and time-consuming to install than equivalent indoor projects.
A fully integrated indoor-outdoor solution
ANT everywhere overcomes this challenge by adding an additional data source for navigation: GNSS with real-time kinematic (RTK) positioning. The result is a seamless indoor-outdoor navigation system that makes outdoor AGV and AMR operations just as robust and precise as those indoors.
“Prior to today, use cases such as transporting components or finished goods from one building to another have not been an easy proposition for AGV and AMR makers. ANT everywhere changes that,” said Dr. Nicola Tomatis. “This tightly integrated product extension enables manufacturers to offer new and robust ‘ANT driven’ vehicles that are accurate, quick to install, and perform as expected, whatever the environment.”
How ANT everywhere works
When an ‘ANT driven’ vehicle is enabled with ANT everywhere, its navigation algorithm uses whichever data source is the most relevant at the time:
- Inside a building: ANT navigation uses its usual odometry, inertial measurement unit (gyroscope), and laser scanner data to calculate a vehicle’s exact position, matching permanent features in the environment with those stored in its onboard site map.
- When transitioning outside: with fewer features visible, GNSS data starts providing ANT with additional positioning information.
- Fully outside: with fewer or zero permanent features visible, GNSS data is given higher priority still.
Thanks to BlueBotics’ advanced sensor fusion, the transition between indoor and outdoor is seamless.
First installation: Barcelona Airport
An ANT everywhere-enabled vehicle recently completed a successful proof of concept trial at Barcelona Airport.
This groundbreaking and highly anticipated project was part of a joint initiative between Worldwide Flight Services and Spanish airport operator AENA, designed to validate the use of autonomous technology in Spanish airports. It ran for three months and involved Qatar Airways cargo being transported between Qatar’s cargo warehouse and BCN Terminal 1, with a total transport time of 20 minutes. The vehicle used was a 25-ton SIMAI tow tractor AGV by Spanish producer MOVVO.
“We’ve successfully installed an ANT everywhere AGV at Barcelona Airport and customers from many other industries are also interested in this technology. Just think how many organizations’ processes involve going into and out of warehouses!” commented Jaume Graells Gallego, the General Manager of MOVVO.
“We believe ANT everywhere has the potential to revolutionize AGV and AMR operations,” Tomatis added, “by making it easier for vehicle producers to develop and install AGVs and AMRs that can move reliably and precisely between indoor and outdoor environments. This, in turn, will allow vehicle manufacturers to expand their reach by meeting the needs of companies in industries ranging from steel, aluminum, and tire production, to airports, aerospace, agriculture, wood, paper, and many more.”
Credit: Source link
Comments are closed.