Breaking Boundaries in 3D Instance Segmentation: An Open-World Approach with Improved Pseudo-Labeling and Realistic Scenarios
By providing object instance-level classification and semantic labeling, 3D semantic instance segmentation tries to identify items in a given 3D scene represented by a point cloud or mesh. Numerous vision applications, including robots, augmented reality, and autonomous driving, depend on the capacity to segment objects in the 3D space. Following advancements in the sensors used to collect depth data, several datasets with instance-level annotations have been described in the literature. Numerous 3D instance segmentation strategies have been put forth recently in light of the accessibility of large-scale 3D datasets and the advancements in deep learning techniques.
A significant disadvantage of 3D instance segmentation systems’ reliance on publicly accessible datasets is learning a predetermined set of item labels (vocabulary). However, there are a lot of object classes in the actual world, and inference may contain many unseen or unknown classes. The unknown classes are ignored by current techniques that learn on a fixed set and are also watched over and given the background label. This makes it impossible for intelligent identification algorithms to recognize unidentified or unusual things that are not background elements. Recent studies have investigated open-world learning settings for 2D object identification due to the significance of detecting unfamiliar items.
A model is intended to recognize unfamiliar items in an open-world environment. Once new classes are labeled, the new set is preferred to be progressively learned without retraining. While prior approaches have mostly been recommended for open-world 2D object identification, they have yet to be investigated in the 3D arena. Understanding how items look in 3D and separating them from the backdrop and other object categories presents the biggest problem. More flexibility is provided by Fig. 1’s 3D instance segmentation in the open environment, which enables the model to recognize unidentified objects and ask an oracle for annotations for these novel classes for further training.

Figure 1: Open-world 3D instance segmentation. The model discovers new items during each iterative learning phase, and a human operator gradually assigns labels to some of them and adds them to the current knowledge base for continued training.
However, this strategy has several drawbacks: Three factors make quality pseudo-labeling techniques necessary: (i) the absence of annotations for unknown classes, (ii) the similarity of predicted features of known and unknown classes, and (iii) the need for a more reliable objectness scoring method to distinguish between good and bad predicted masks for 3D point clouds. In this study, researchers from Mohamed Bin Zayed University of Artificial Intelligence (MBZUAI), Aalto University, Australian National University and Linköping University look at a unique issue setting called open-world indoor 3D instance segmentation, which tries to segment objects of unknown classes while gradually adding new classes. They construct practical protocols and splits to verify the 3D instance segmentation techniques’ capacity to recognize unidentified objects. As in incremental learning settings, the suggested configuration adds unknown item labels to the list of recognized classes. They provide a probabilistically corrected unknown item identifier that enhances object recognition. They are the first researchers, as far as they are aware, to investigate 3D instance segmentation in an open-world environment.
Their study makes the following major contributions:
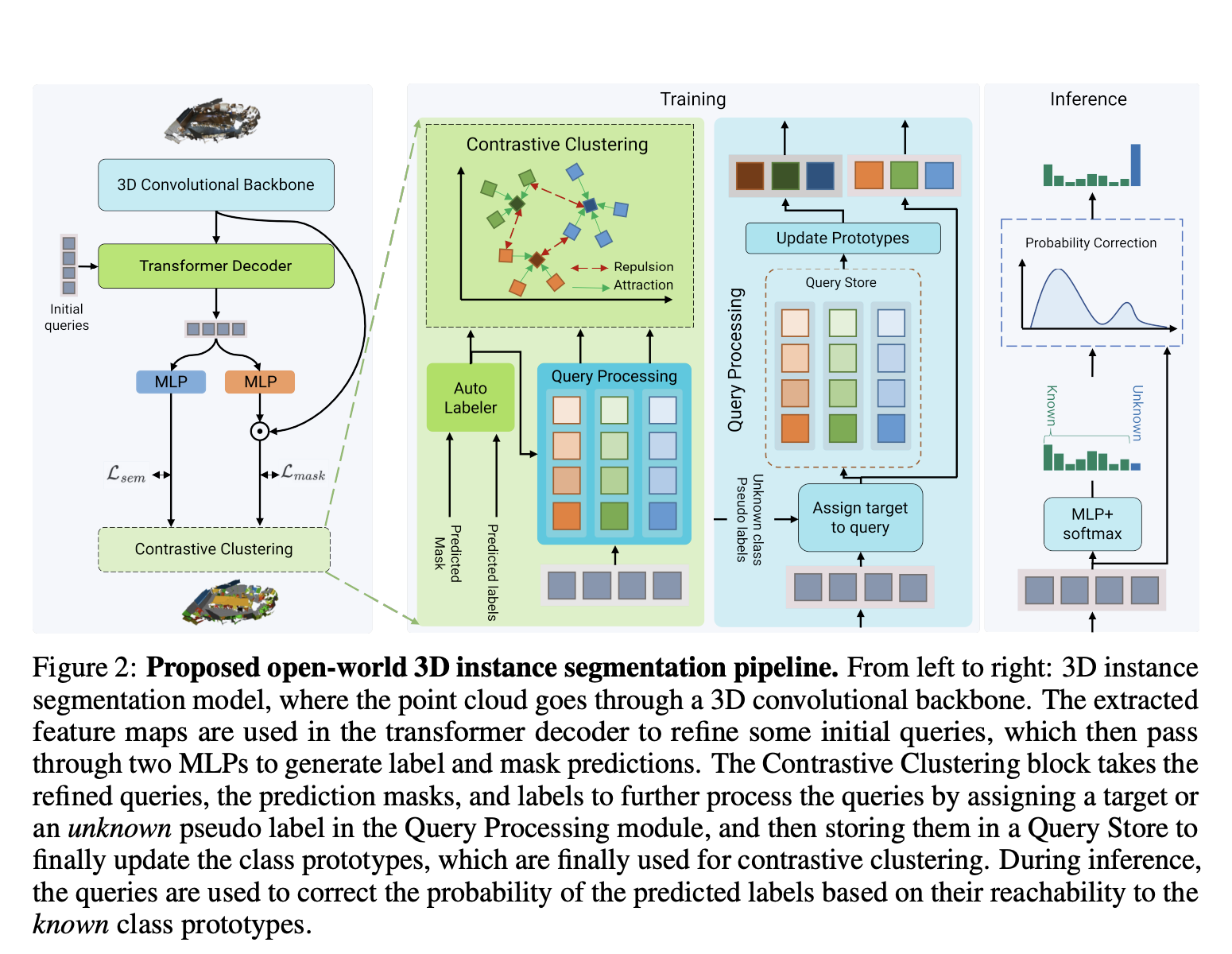
• They provide the first open-world 3D indoor instance segmentation approach with a special mechanism for identifying 3D unidentified items precisely. They use an auto-labeling approach to distinguish between known and unknowable class labels to produce pseudo-labels during training. By modifying the likelihood of unknown classes based on the distribution of the objectness scores, they further enhance the quality of the pseudo-labels at inference.
• For a thorough assessment of open-world 3D indoor segmentation, they present carefully selected open-world divides, having known vs. unknown and incremental learning over 200 courses. Their suggested splits use a variety of realistic circumstances, including object classes’ innate distribution (frequency-based), distinct class types discovered when exploring inside spaces (region-based), and the randomization of object classes in the outer world. Numerous tests demonstrate the value of the suggested solutions for closing the performance gap between their technique and the oracle.
Check out the Paper and Github. All Credit For This Research Goes To the Researchers on This Project. Also, don’t forget to join our 31k+ ML SubReddit, 40k+ Facebook Community, Discord Channel, and Email Newsletter, where we share the latest AI research news, cool AI projects, and more.
If you like our work, you will love our newsletter..
We are also on WhatsApp. Join our AI Channel on Whatsapp..
![]()
Aneesh Tickoo is a consulting intern at MarktechPost. He is currently pursuing his undergraduate degree in Data Science and Artificial Intelligence from the Indian Institute of Technology(IIT), Bhilai. He spends most of his time working on projects aimed at harnessing the power of machine learning. His research interest is image processing and is passionate about building solutions around it. He loves to connect with people and collaborate on interesting projects.
Credit: Source link
Comments are closed.