Figure 01 humanoid takes first public steps
|
Listen to this article  |
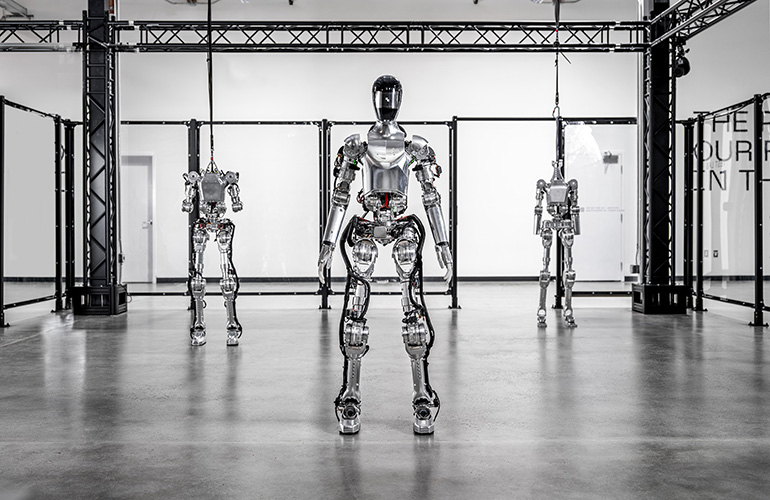
Figure today unveiled its Figure 01 humanoid robot and demonstrated dynamic bipedal walking publically for the first time. The company has grown to 60 employees over the last year and includes engineers across AI, controls, embedded software, electrical, mechanical, actuator design, battery, integration and testing. The company announced its $70M round in May 2023 and developed the robot in a little over 12 months.
As shown in the video above, Figure 01 sports a nice, shiny metal exterior. This is different from the simulated versions shown in prior illustrations of the robot to this point. There will likely be some evolution in the product finish before release.
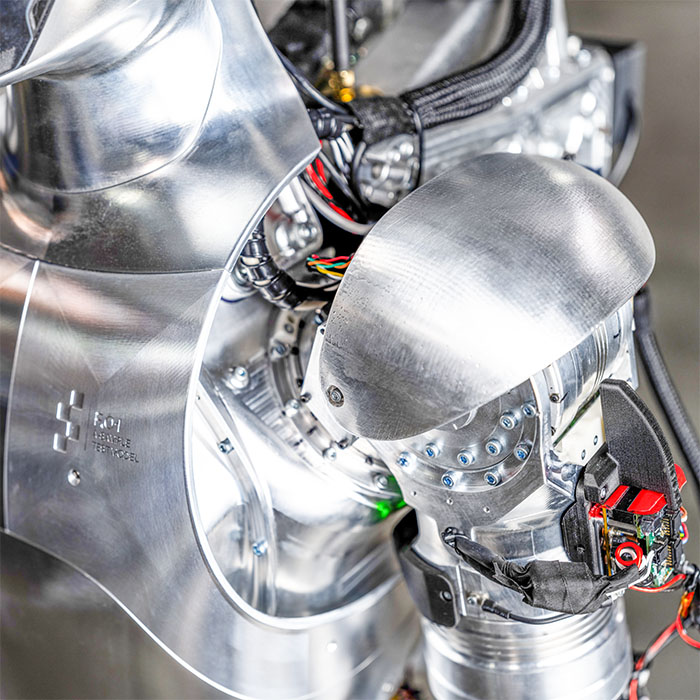
This close-up of the Figure 01 shoulder shows the detail of the motor configuration for the shoulder and arm joints. | Credit: Figure
All of the major joints appear to be articulated with rotary motors. This version of the robot includes a backpack for the battery.
Here’s a quick summary of the degrees of freedom (DoF) for this version of the robot:
Arms: 7 DoF
Waist: 3 DoF
Legs/Ankle/foot: 6 DoF
Head: 0 DoF
Hand: 6 DoF
Total: 41 DoF
The hands have four fingers and an opposable thumb, and each phalange is a simple two-bar design (simplifying the design). The foot and ankle is a simple articulating platform.

Figure 01 has 6 DoF hands with simplified digits. | Credit: Figure
The Figure team was able to achieve dynamic bipedal walking in under a year, which the company claims to be one of the quickest turnarounds in humanoid history.
Figure 01 uses torque-controlled walking, which tells the robot what torque to apply at its joints instead of where or how fast it is going. This should help Figure 01 navigate the real world, especially when working with people and doing business functions.
This front view shows the waist and hip joints. | Credit: Figure
The robot is given high-level commands about how fast to move, and then it has to think about tasks like balance, where to put its feet, and how to move its hands so that it can walk in a way that is not affected by outside disturbances or changes in ground height.
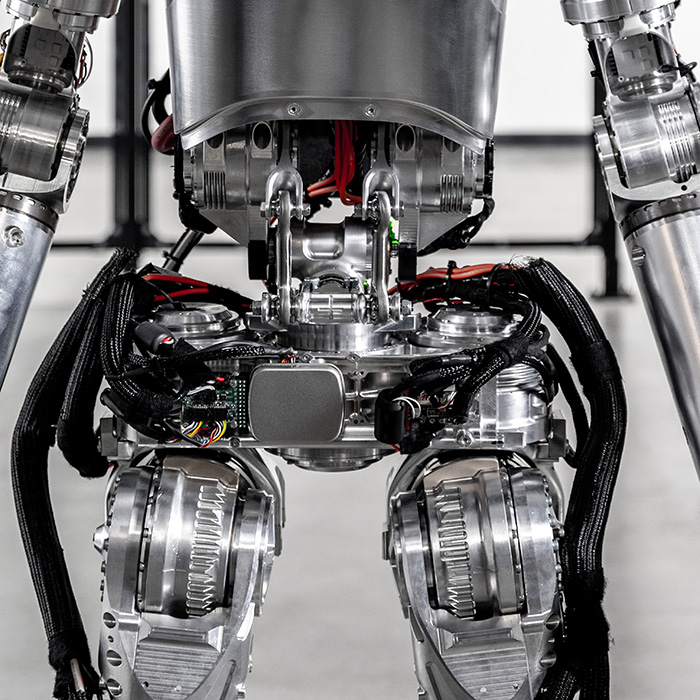
This close up shows detail of Figure 01’s waist and hip joints. | Credit: Figure
The team has also been working on “whole body reasoning”, which encapsulates a natural arm swing, and where torso and pelvis motion is achieved by regulating angular momentum rather than prescribing specific trajectories.

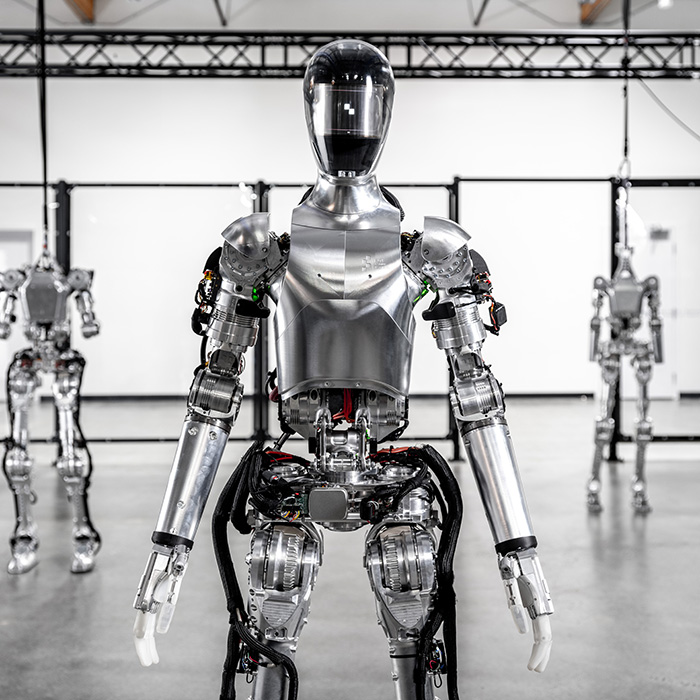
Figure 01 has a “race helmet” inspired head which includes an LCD screen to communicate with human users. | Credit: Figure
Separately, the Figure team has been developing manipulation with the arms, hands, and fingers. This development continues independently of the walking/gait teams’ work to get the robot moving and navigating its world.
The company has built a demo warehouse in its Sunnyvale headquarters, an indication of the most likely early market opportunity for Figure 01 when it’s released in 2024.
Credit: Source link
Comments are closed.