GITAI’s robotic arm completes proof-of-concept demo
|
Listen to this article  |
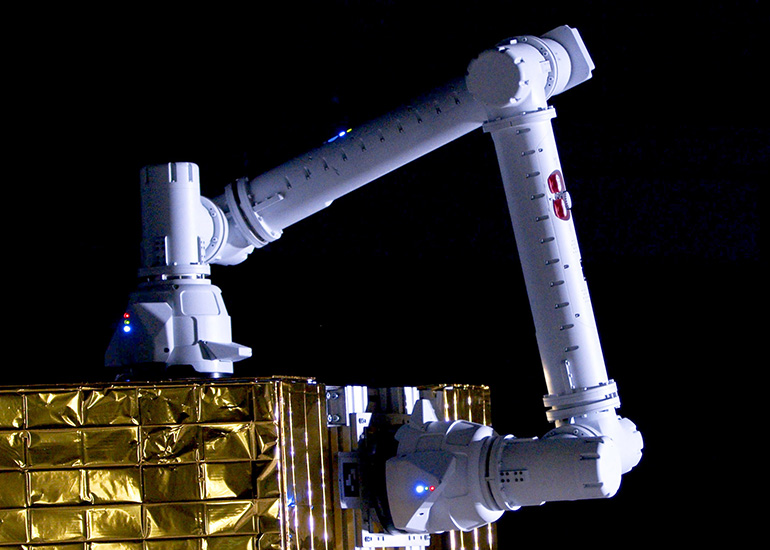
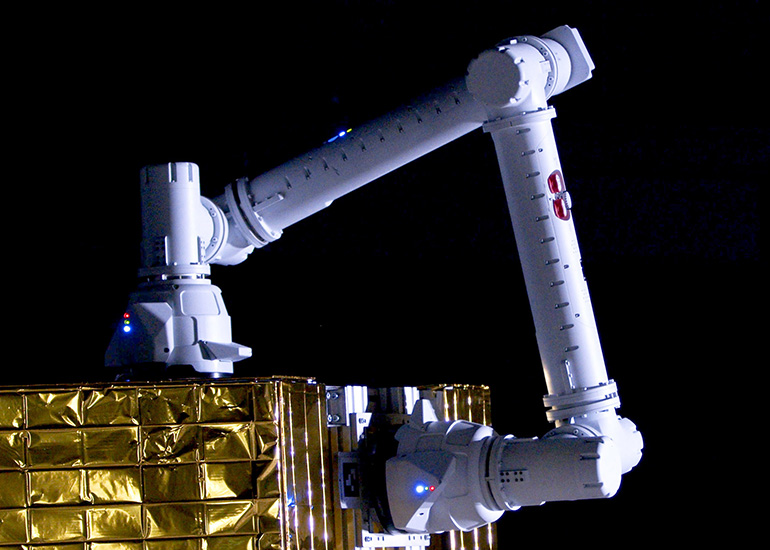
The GITAI IN1 robotic arm during its mobility performance test. | Source: GITAI
GITAI, a space robotics company, has completed proof-of-concept demonstrations for its GITAI IN1, or Inchworm One, robotic arm.
GITAI IN1 is a robotic arm with grapple end-effectors on both ends of the arm. The grapple end-effectors are GITAI’s proprietary technology that allows the end of robotic arms to be interchangeable. This allows users to connect various tools to the robot to perform multiple tasks and allows the arm to move autonomously if it has an end effector at both ends of the arm.
GITAI completed various tests with the GITAI IN1 and GITAI R1 lunar rovers corresponding to Level 3 of NASA’s Technology Readiness Levels (TRL). The tests were completed in a simulated lunar environment at the JAXA Sagamihara Campus.
During the demonstration, GITAI’s robots emulated tasks that could be required for lunar exploration and lunar base construction. The robots completed mobility and capability performance verification tests.
For the mobility performance test, the IN1 robotic arm autonomously traveled from the lunar lander to the R1 rover. IN1 then moved to a worksite carried by the R1 rover and performed various tasks. To finish the test, IN1 made its way back to the lunar lander.
During IN1’s second test, the capability performance verification test, the robot performed tasks having to do with lunar resource extraction operations. IN1 broke down resources using cutting tools, recovered resource samples with shovels, and transported resource samples with a tow vehicle. To perform all these tasks, IN1 switched between multiple end-effectors.
GITAI was founded in 2016 and is based in Tokyo. It raised $4.1 million in 2019, and another $17.1 million in early 2021. In October 2021, it completed technology demonstrations inside the ISS.
The company’s other offerings include the G1, a space-dedicated general-purpose robot, S1, a task-specific robot, and H1, a robot manipulation system.
Credit: Source link
Comments are closed.