How can Pre-Trained Visual Representations Help Solve Long-Horizon Manipulation? Meet Universal Visual Decomposer (UVD): An off-the-Shelf Method for Identifying Subgoals from Videos
In the research paper “Universal Visual Decomposer: Long-Horizon Manipulation Made Easy”, the authors address the challenge of teaching robots to perform long-horizon manipulation tasks from visual observations. These tasks involve multiple stages and are often encountered in real-world scenarios like cooking and tidying. Learning such complex skills is challenging due to compounding errors, vast action and observation spaces, and the absence of meaningful learning signals for each step.
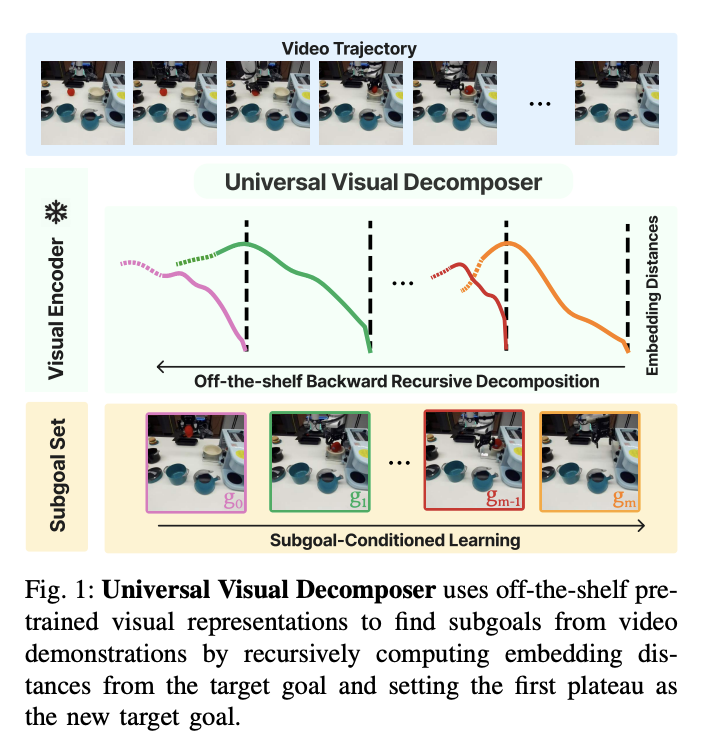
The authors introduce an innovative solution called the Universal Visual Decomposer (UVD). UVD is an off-the-shelf task decomposition method that leverages pre-trained visual representations designed for robotic control. It does not require task-specific knowledge and can be applied to various tasks without additional training. UVD works by discovering subgoals within visual demonstrations, which aids in policy learning and generalization to unseen tasks.
The core idea behind UVD is that pre-trained visual representations are capable of capturing temporal progress in short videos of goal-directed behavior. By applying these representations to long, unsegmented task videos, UVD identifies phase shifts in the embedding space, signifying subtask transitions. This approach is entirely unsupervised and imposes zero additional training costs on standard visuomotor policy training.
UVD’s effectiveness is demonstrated through extensive evaluations in both simulation and real-world tasks. It outperforms baseline methods in imitation and reinforcement learning settings, showcasing the advantage of automated visual task decomposition using the UVD framework.
In conclusion, the researchers have introduced the Universal Visual Decomposer (UVD) as an off-the-shelf solution for decomposing long-horizon manipulation tasks using pre-trained visual representations. UVD offers a promising approach to improving robotic policy learning and generalization, with successful applications in both simulated and real-world scenarios.
Check out the Paper and Project. All Credit For This Research Goes To the Researchers on This Project. Also, don’t forget to join our 31k+ ML SubReddit, 40k+ Facebook Community, Discord Channel, and Email Newsletter, where we share the latest AI research news, cool AI projects, and more.
If you like our work, you will love our newsletter..
We are also on WhatsApp. Join our AI Channel on Whatsapp..
![]()
Pragati Jhunjhunwala is a consulting intern at MarktechPost. She is currently pursuing her B.Tech from the Indian Institute of Technology(IIT), Kharagpur. She is a tech enthusiast and has a keen interest in the scope of software and data science applications. She is always reading about the developments in different field of AI and ML.
Credit: Source link
Comments are closed.