How NVIDIA, Open Robotics are improving ROS 2
|
Listen to this article  |
NVIDIA and Open Robotics, the company behind the popular robot operating system (ROS), have long supported each other. But the companies are taking the partnership to another level with ROS 2, the more hardened, secure version of the middleware suite.
Accelerated performance
NVIDIA and Open Robotics are working together to accelerate the performance of ROS 2 on NVIDIA’s Jetson edge AI platform and GPU-based systems. The initiatives will reduce development time and improve performance for developers seeking to incorporate computer vision and machine learning functionality into their ROS-based applications.
“The ROS framework is CPU-centric today,” said Murali Gopalakrishna, head of product management for autonomous machines and GM for robotics at NVIDIA. “We’re making it more heterogeneous to leverage GPUs and deep neural networks and other hardware accelerators. This is very important to improve the quality of robots and the speed to market for robotics companies.”
Open Robotics will enhance ROS 2 to enable efficient management of data flow and shared memory across GPU and other processors present on the NVIDIA Jetson edge AI platform. The companies said this will improve the performance of applications that have to process high-bandwidth data from sensors such as cameras and LiDARs in real time.
“As more ROS developers leverage hardware platforms that contain additional compute capabilities designed to offload the host CPU, ROS is evolving to make it easier to efficiently take advantage of these advanced hardware resources,” said Brian Gerkey, CEO, Open Robotics. “Working with an accelerated computing leader like NVIDIA and its vast experience in AI and robotics innovation will bring significant benefits to the entire ROS community.”
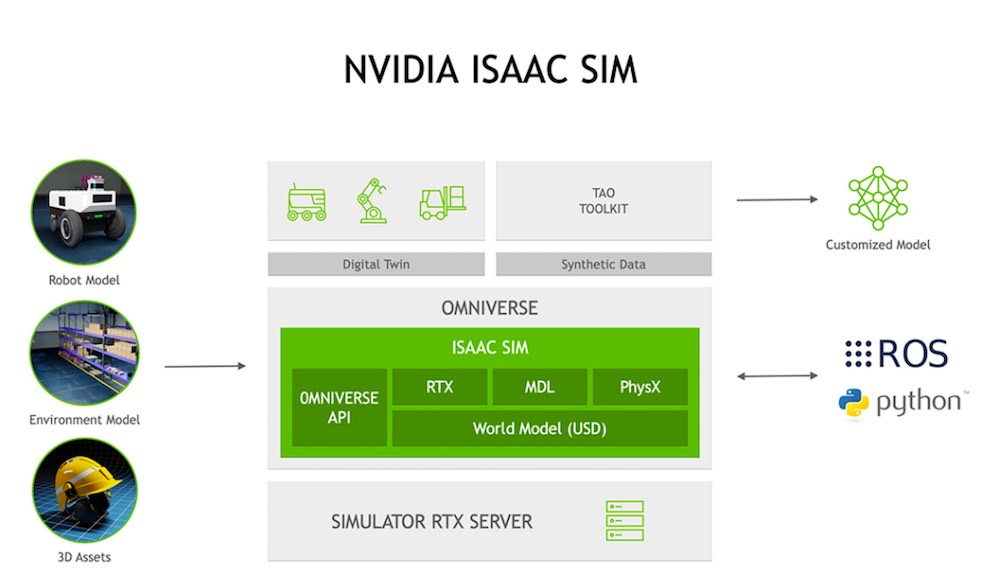
Functional block diagram of Isaac Sim showing robot model, environment model, and 3D asset inputs. | Credit: NVIDIA
Simulation interoperability
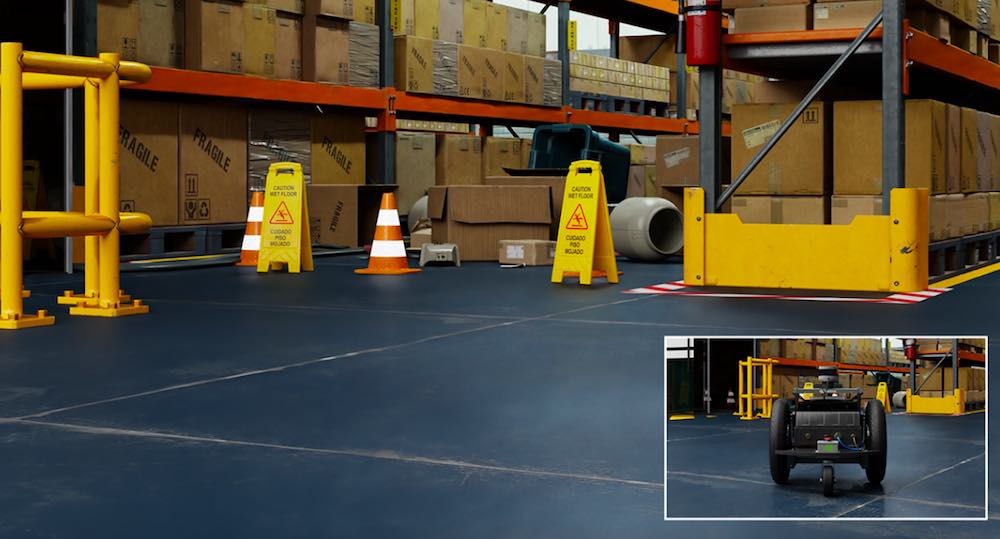
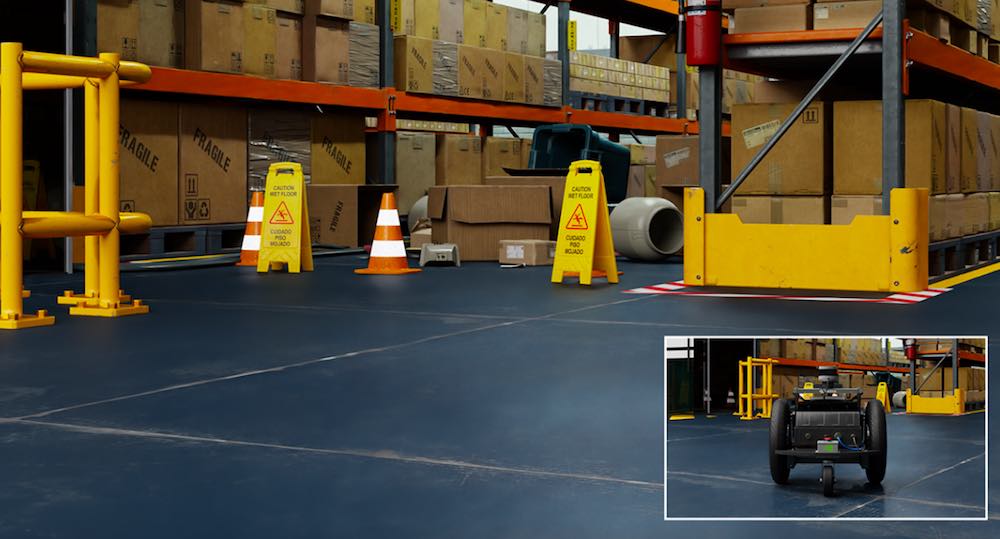
The companies are also developing simulation interoperability between Open Robotics’s Ignition Gazebo and NVIDIA Isaac Sim on Omniverse. Isaac Sim already supports ROS 1 and ROS 2 out of the box. But connecting the two allows ROS developers to more easily move their robots and environments between each simulator and capitalize on their respective benefits.
NVIDIA highlights the ability of Isaac Sim to generate synthetic data to train and test perception models. Once Isaac Sim generates synthetic datasets, they can be fed into NVIDIA’s AI model adaptation platform to adapt perception models for a robot’s specific working environment.
The latest version of Isaac Sim includes significant support for ROS developers. Some of the more compelling examples of this, NVIDIA said, are the ROS 2 Navigation stack and the MoveIt Motion Planning Framework. Other examples of Isaac Sim’s support of ROS include:
- ROS April Tag
- ROS Stereo Camera
- ROS Navigation
- ROS TurtleBot3 Sample
- ROS Manipulation and Camera Sample
- ROS Services
- Native Python ROS Usage
“Developers could take domain-specific data for a hospital, a warehouse, or a store,” Gopalakrishna said. “They can use that data, our tools and augment that with real-world data to build robust, scalable models in photo-realistic environments that obey the laws of physics.”
He added that NVIDIA will also be release pre-trained models.
NVIDIA also released new Isaac GEMs for ROS. Isaac GEMs for ROS are hardware accelerated packages that make it easier for ROS developers to build high-performance solutions on the Jetson platform, when compared to CPU-only packages. The focus of these GEMs is on improving throughput on image processing and on deep neural network-based perception models that are of growing importance to roboticists.
The new Isaac GEMs for ROS include:
Gopalakrishna said NVIDIA will release more Isaac GEMs for Jetson developers, including several popular DNNs, and new Isaac Sim features at ROS World, which takes place virtually Oct. 21-22. ROSCon, a popular event dedicated to ROS, was cancelled for the second straight year due to COVID-19.
“ROS started as a hobby project, but people started to build on it, and it took on a life of it’s own,” said Gopalakrishna. “There has been a lot of effort to harden ROS 2 and its performance. ROS 2 takes learnings from ROS 1, made it more streamlined and fixed shortcomings such as message passing and DDS. This makes ROS 2 more scalable and performant. Now it makes even more sense for us to offer hardware acceleration.”
Credit: Source link
Comments are closed.