Indy Autonomous Challenge CEO Paul Mitchell provides race updates
|
Listen to this article  |

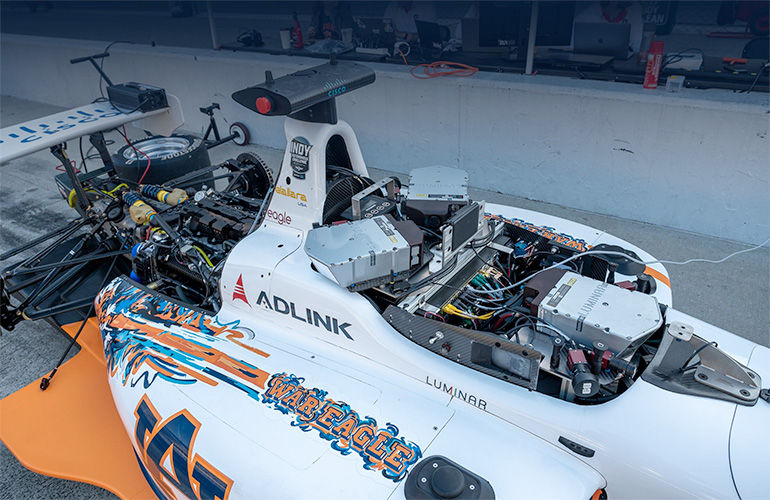
With the top cowling removed, all of the controls, compute and sensors are accessible on the Dallara AV21 racecar. | Credit: Indy Autonomous Challenge
The Robot Report recently sat down with Indy Autonomous Challenge co-founder and CEO Paul Mitchell to catch up on the latest news about the self-driving race series and what we can expect to see in the coming year.
The Indy Autonomous Challenge (IAC) went international for the first time with an event at the Milan Monza Motor Show in Italy earlier this year. Can you give us an update on how that event went?
We made the decision to go to Monza in Italy, and this wasn’t an easy decision, because until now, we’ve only run the cars on ovals. The teams had been tuning their AI drivers to master oval racing and the complexities of optimizing driving at speed on ovals.
We could have continued the competition on ovals and begun to add additional cars on the track at the same time. Or we could pivot and demonstrate that this type of competition can be done effectively on road courses.

Paul Mitchell, CEO of the Indy Autonomous Challenge
This decision is more analogous to our primary objective, which is how to achieve high speed and autonomy at scale in a way that would improve highway safety. So road courses are obviously a better proxy for that.
Our decision was mission-oriented; it wasn’t just about going to Europe. While it’s fun to go to Europe, and it’s fun to run on a famous track, it really started with the question: “Should we go to road courses?”
Our original competition was held at Indianapolis Motor Speedway [IMS], and if you’re going to do something for the first time, there’s this kind of exciting, historic impact of doing it at the oldest and most storied venues. So for ovals, that’s IMS, and for road courses, that’s Monza.
Did you capture the attention of the international automotive world at Monza?
Right. First, we had to get the cars and the teams accustomed to the road course. A lot went into getting the cars ready for the road, including modifications and setup to run on a road course instead of ovals. Teams had to get familiar with the road-course format.
We felt like it made sense for the first competition to just be time trials, similar to what ended up happening in Indianapolis the first time we ran there.
The teams encountered some new challenges, particularly around the reliability of localization through GPS. There are two bridges at Monza, and then there are a couple of sections with significant trees close to the track. Down the main straightaway, the infrastructure of the suites and the F1 paddock spaces hangs over the track. So you end up with some different GPS dead spots coming out of the pits.
This required teams to make adjustments to their software to be able to manage localization using other methods beyond GPS, which they eventually figured out.
We set a number of records during the event. I think we had speeds that reached 274 kph [170 mph]. We had three teams that went into the final round of the time-trial competition separated by only maybe 12 seconds. They were all hovering right around 2 minutes and pushing 2 minutes and 10 seconds. In the end, I think the winning time was around 2 minutes and 5 seconds.

Team Polimove follows the movement of their vehicle around the track and adjust the parameters to adjust the operation of the vehicle. | Credit: The Robot Report
The other thing that we noticed was that there was a lot of enthusiasm from the general public of all ages in Italy to look at these cars and learn about them and be exposed to autonomous technology. For many of them, it might have been the first time they had encountered or seen an autonomous vehicle.
Autonomous vehicles are not as commonplace in the Milan area or even in Europe. There are probably some sections in Germany where they’re doing some testing. But you don’t have Waymo and Cruise doing public pilots in different communities. So I think there was a fascination with that.
Then the application of autonomous technology to something that’s very near and dear to the hearts of the Italian general public of racing, I think [that] was interesting. We were part of the Milan Monza Motor Show. It’s a great example of an open-air motor show that was really launched, coming out of COVID, right as different auto shows looked for ways to be safe and relevant.
The organizers chose to create this outdoor festival that really was built around the racetrack. About 60,000 people came out across the three days, and probably all of them at some point saw the cars [on the track] or came into the garage and looked at them. There was a pretty constant line of people watching the teams working on the cars or watching when ran the cars two times a day each day for the three days.
There were some wonderful supercars from McLaren, Bugatti, and Lamborghini and all kinds of activities, food, and bands and other things to do. So the fact that people found it interesting enough that most of them came in and sat down and watched the finals was pretty cool.
It certainly was aided by the fact that the winning team was again the local team from Politecnico di Milano, which has now won three events in a row. That didn’t hurt in terms of generating some local enthusiasm.
We’ve already publicly said we’re going back in June 2024. We have some planning to do because they’re doing some construction at the Autodromo Nazionale Monza. The plan is to take the competition to the next level, with more multi-vehicle racing versus the single-car, time-trial model.
So you’re following the same stepwise formula that you’ve followed on the oval to increase the difficulty in complexity while improving the vehicle’s capability? You’ve replaced some of the base vehicle components with more powerful, more capable solutions. Can you walk us through the Indy Autonomous Challenge’s revised technology stack?
We’re going to really roll it out and talk about it in depth during CES. What I can share is a little bit higher-level versus getting into the exact configuration. I can talk about the companies that are contributing technology that is either new or where we have upgraded parts.
We developed the autonomous race car that we’ve been running through a partnership with Clemson University’s Center for Automotive Research, International Center for Automotive Research, back in 2019. It was kind of a world-first; there had been some autonomous vehicles that had been run at higher speeds through the Roborace initiative that preceded the Indy Autonomous Challenge. And some of our teams had participated in that.
However, IAC was the first time that autonomous race cars were built to be identical on the physical race platform. We also didn’t know how the software and components would hold up under real-world race conditions. Frankly, when it was being designed, there was no expectation that these cars were going to be run beyond October of 2021, when we had the million-dollar prize competition at IMS.

AI Racing Team crosses the brick finish line at the Indianapolis Motor Speedway. | Source: The Robot Report
This initial event was followed by the event at CES 2022, and since that time, these vehicles have raced more than 11,200 km [7,000 mi.]. So it was time to upgrade the cars, not just from a performance standpoint, but also from a maintenance and tuning perspective, given the harsh operating conditions.
We’ve built up the internal engineering capabilities here in Indianapolis, which is the racing capital, at least in the U.S. This is where there’s a lot of engineering know-how around automotive and where a lot of the components and systems are actually designed, engineered, and manufactured. All of the vehicle components are sourced locally.
The question was: How can we make these cars more serviceable and more durable? Can we use fewer parts? Can we reduce the number of connections and the number of wires and thus reduce the number of failure modes and pain points that might exist?
Right after the first event at Indy, we realized that some changes were necessary because certain components were breaking down. So we made the switch to the dSPACE Autera central computer.
But this year was a chance to step back and completely redesign all of the controls architecture. One of the cool stories is that Janam Sanghavi, who led the effort at Clemson, is now our director of vehicle engineering.
He was the lead student of the student-led team at the Clemson Deep Orange program that designed the first prototype for the Indy Autonomous Challenge cars. So for him, it was a great opportunity to go back and update things that he learned through the process.
The story is really about improving the durability, functionality, accessibility, and serviceability of the system because these cars wreck a lot. And when they have wrecked, we’ve been able to not have too much damage to the autonomous systems in the cockpit.
However, as speeds increase, and as wrecks become more energetic, it’s inevitable that there’s going to be more pressure on those systems in the cockpit.
Then the other storyline is upgrading and changing the core components in the autonomous stack. First, the technology that was available in 2019 and 2020 is different than the technology that’s available today. That’s a sign of just how quickly this industry is progressing.
For example, the Hydra lidar from Luminar is no longer in production. So we’re switching to the Iris lidar from Luminar.
Then, we changed to a more upgraded radar system from Continental. We’ve been waiting on that for a little while. So we knew that we were going to do that with Continental, even back last year when it came on as a partner of IAC. But we’re finally getting those radars integrated into the vehicles.
We’re working with the vendors to perhaps move to a newer version of the cameras. The cameras have been working pretty well for us. The differences in the technology may not be as extreme as what you see in the difference between lidar a few years old and now, but it’s still meaningful.
The central computer stays the same — it’s still the dSPACE Autera product. We’re sticking with that because it’s been a great solution for us. We have upgraded networking and communication technology from Cisco.
We’re also implementing a new race-control solution from Marelli, which we piloted at Monza, and it worked great for us. But now we’re really, fully integrating that into the cars. It’s the same telemetry, communication system, and race control software system that’s used in Formula 1. So that’s exciting to have that on the vehicles.
And that allows the Indy Autonomous Challenge to do some cool things around greater automation of race control that would reflect the automation of the drivers.
The other significant change is to the drive-by-wire systems. So I think we learned through our journey that drive-by-wire systems are not something that you can just take off the shelf and put on to an application like a race car, and because it’s worked on a passenger car, it’s going to work fine on a race car.
Part of IAC’s goal is to see what can you take off-the-shelf hardware and software that’s used in autonomous vehicles today, and see how will it hold up at 240 KPH (150 MPH) or higher. The physics of the high-speed racing use case is just different than the physics of a passenger car or commercial vehicle. You have to size the actuators to be able to deal with that.
The drive-by-wire system that is going into the vehicle is actually something we’ve designed internally, through the Autonomous Challenge. We worked with some different vendors, but the selection of the actuators, the design integration, and the software things that we’ve done, are specific to this race car.
Under race conditions, you want each team to have the steering and braking be responsive. So we’ve put a lot of time into that so that the teams aren’t fighting the control infrastructure.
Dallara AV-23 technical specs
The Indy Autonomous Challenge said the Dallara AV-23 transformation will be done before the end of 2023. It will be completed in phases to allow for testing and validation of new and updated systems. In addition to a new central computer from dSPACE and new GPS systems from VectorNav, other technology that will be enhanced with the AV-23 includes:
- New radar sensors from Continental
- Updated lidar systems from Luminar
- Enhanced communications and networking solutions from Cisco
- Cloud computing and data analytics from Amazon Web Services
- Advanced racing tires capable of both oval and road course performance from Bridgestone
- On-board supercomputer from dSPACE
- GPS/GNSS connectivity from VectorNav
- Aero kit and other vehicle system modifications from Dallara
As you continue to push the race cars to higher speeds, you have to predict where this is going to go next. Do you want this platform to have some life to it?
This is one of the things we’ll talk about when we get to CES in January. We’ll be able to talk about some of the fun stuff with a drive-by-wire system that is, let’s say, “uniquely relevant” to autonomous vehicles.
So there are features we’ve included that a human-driven vehicle wouldn’t do, or would or wouldn’t be possible because of the operator being, a human being with two feet, not five feet or six feet.
So are you hinting that the new platform will enable outputs that exceed what a human could do in the driver’s seat?
Right. And I don’t think we were really optimizing for that previously. If you’re going to do an autonomous vehicle, you’re trying to demonstrate the full potential of autonomy then you should put in actuators and systems that give greater freedom for inputs and commands that otherwise aren’t available when you’re talking about a human operator.
We’re keeping with the VectorNav GPS system. That was a change we had made mid-journey. They weren’t on the original car, but we’ve added them. So GPS GNSS remains the Vector Nav system that we had put on the cars, but with some new wiring, and then a lot of it is around packaging the controls in a better way.
There’s automotive Ethernet now; that’s kind of a new thing. So we’re using that where it makes sense, together with a lot more durable connectors that are available for autonomous vehicles today than there were in 2019. The reliability of connectors and reducing the number of connectors — or failure points — are key to the overall reliability of the vehicle.
This next-gen system is not a new form-factor racecar but is an overhaul of the autonomous systems while balancing the changes, so as not to set the teams back in terms of having to start from the ground up with the coding of their software and their AI drivers.
Can you update us on the IAC’s field of competitors for next year?
We still have nine teams. I think there’s there’s a 10th team that’s lurking that has expressed its intention to participate.
We’ve had some additional universities come on. I think we’re up to 18 universities now that make up those nine teams. Some of those announcements will happen between now and CES. Some teams taking on additional university partners. In some cases, there has been a change in leadership of an existing team.
A lot of U.S. institutions have expressed interest in getting involved. I think they’re probably seeing the success of the European teams and saying, “Hey, what about us? We want to get involved.” In some cases, they want to collaborate with the European and Asian teams.

Team Polimove won the 2023 Autonomous Challenge@CES event held at the Las Vegas Motor Speedway. | Credit: The Robot Report
How important is U.S. automotive competitiveness to the Indy Autonomous Challenge?
We’re based here in the U.S. Obviously, a big part of our mission as nonprofit organization is advancing the automotive industry. We want to do so in a way that helps the U.S. and our allies remain competitive.
In this global environment, there’s a lot more activity today than there was when we got started in this space of high-speed automation. We’re also seeing much, much more interaction between academic institutions and the industry and even the defense community.
Some of our teams have partnerships with DoD, and European teams have partnerships with their defense communities. The development of AI-based, high-speed algorithms and vehicles that are capable of operating autonomously [has] become an area of IP development and competitiveness.
When we first started, it was just a question of “Can you actually make an autonomous car go really fast and build a race car that can drive itself?” And once the answer is “Yes,” and you’ve proven that to the world, then that opens up a new category of competition and new interest from nation-states and different groups.
I think you’ll see some continued collaborations that we’re trying to establish around applied research and technology development and IP development between the universities that are part of the IAC, We want to do so in a way that helps the the industries in the U.S., Europe, and parts of Asia, particularly South Korea and Japan.
What you can tell me about changes to the competition we’ll see at CES 2024 in Las Vegas?
There won’t be a lot of changes to the competition because Vegas is the last time that the legacy cars are running. The next-gen Dallara AV-23 vehicle will debut at CES 2024. We expect to have three of them operating at the track and doing exhibition testing and validation.
But on the track and in the competition, we will have lthe current AV-21 cars that some of the teams will be using in a passing competition that’ll be in a similar format to what we at CES 2023.
And the logic there was that we didn’t want to build all the new race cars and roll them out and test them for the first time in Las Vegas. We wanted to do so iteratively.
So we asked the teams who wanted to focus on shakedown and development of the new car and testing and validation, and who wanted to run another round of competition. We had some teams that haven’t really been able to shine as much as they’d like to in those competitions. So they have opted for the passing competition, and then a few of them said they were eager to start working on the new car.
We’ve structured it in such a way that the learnings on the new car are going to be shared among all the teams, and then everyone is going to get access to the new cars after CES. We should view the cars that are debuting in the West Hall at CES as static, with some active demonstrations.
Using what we learn at Vegas, we’ll make any final adjustments before we convert all the vehicles to the new next-gen system and turn them over to the teams to start really practicing in earnest for Monza and the rest of this schedule for next year, which we’ll be announcing at CES.
So there may be more Indy Autonomous Challenge races than just Monza in 2024?
Yes, there’s going to be another major race after Monza next year. And there’ll be some exciting news at CES about how those races will be connected. So some fun, historical context, matching the old and the new with an event at Monza and another event back in the U.S. We’ll roll that out at CES.
We’re also changing the event schedule for the racing at CES to enable attendees to not only see the start of the racing, but also be there for the final heats when the racing really gets exciting, as well as run under the lights. So if you’re going to Las Vegas for CES 2024, be sure to stick around until Saturday for the Indy Autonomous Challenge @ CES event.
Editor’s note: This conversation with Paul Mitchell was transcribed by https://otter.ai and edited for readability.
Credit: Source link
Comments are closed.