Inuitive sensor modules offer VSLAM capabilities for AMRs
|
Listen to this article  |
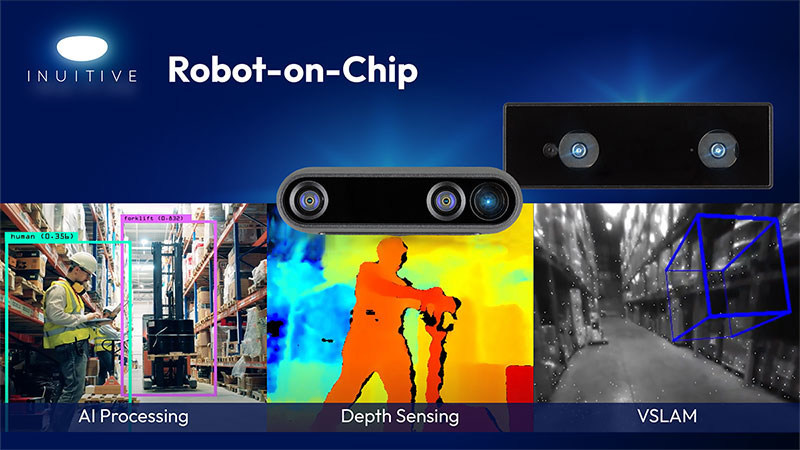
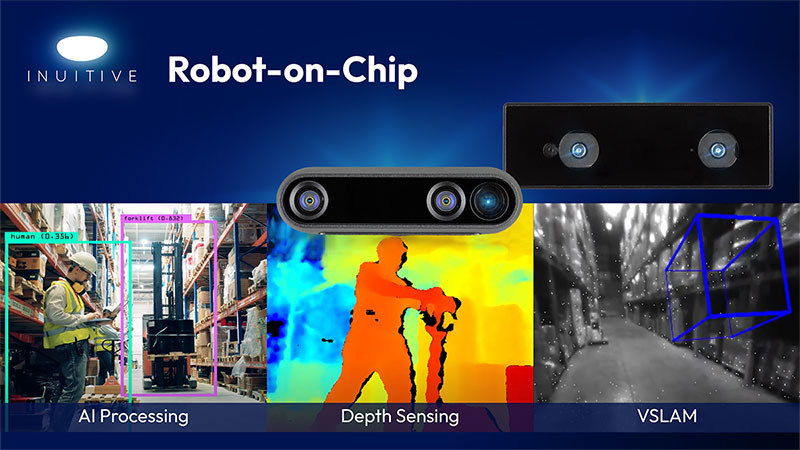
Inuitive introduces the M4.5S (center) and M4.3WN (right) sensor modules that add VSLAM for AMR and AGVs.
Inuitive, an Israel-based developer of vision-on-chip processors, launched its M4.5S and M4.3WN sensor modules. Designed to integrate into robots and drones, both sensor modules are built around the NU4000 vision-on-chip (VoC) processor adds depth sensing and image processing with AI and Visual Simultaneous Localization and Mapping (VSLAM) capabilities.
The M4.5S provides robots with enhanced depth from stereo sensing along with obstacle detection and object recognition. It features a field of view of 88×58 degrees, a minimum sensing range of 9 cm (3.54″) and a wide dynamic operating temperature range of up to 50 degrees Celsius (122 degrees Farenheit). The M4.5S supports the Robot Operating System (ROS) and has an SDK that is compatible with Windows, Linux and Android.
The M4.3WN features tracking and VSLAM navigation based on fisheye cameras and an IMU together with depth sensing and on-chip processing. This enables free navigation, localization, path planning, and static and dynamic obstacle avoidance for AMRs and AGVs. The M4.3WN is designed in a metal case to serve in industrial environments.
“Our new all-in-one sensor modules expand our portfolio targeting the growing market of autonomous mobile robots. Together with our category-leading vision-on-chip processor, we now enable robotic devices to look at the world with human-like visual understanding,” said Shlomo Gadot, CEO and co-founder of Inuitive. “Inuitive is fully committed to continuously developing the best performing products for our customers and becoming their supplier of choice.
The M4.5S and the M4.3WN sensor modules’ primary processing unit is Inuitive’s all-in-one NU4000 processor. Both modules are equipped with depth and RGB sensors that are controlled and timed by the NU4000. Data generated by the sensors and processed in real-time at a high frame rate by the NU4000, is then used to generate depth information for the host device.
Credit: Source link
Comments are closed.