KAIST Researchers Introduce Quatro++: A Robust Global Registration Framework Exploiting Ground Segmentation for Loop Closing in LiDAR SLAM
The problem of sparsity and degeneracy issues in LiDAR SLAM has been addressed by introducing Quatro++, a robust global registration framework developed by researchers from the KAIST. This method has surpassed previous success rates and improved loop closing accuracy and efficiency through ground segmentation. Quatro++ exhibits significantly superior loop closing performance, resulting in higher quality loop constraints and more precise mapping results than learning-based approaches.
The study examines how global registration affects graph-based SLAM, focusing on loop closing. Compared to learning-based methods, Quatro++ is particularly effective at closing loops, improving loop constraints, and producing more accurate maps. It also delivers consistent results across different viewpoints and reduces the trajectory distortions seen in other approaches.
The Quatro++ method solves the crucial task of 3D point cloud registration, which is fundamental in robotics and computer vision. While many LiDAR-based SLAM methods prioritize odometry or loop detection, the importance of loop closing in improving loop constraints has been understudied. To overcome the sparsity and degeneracy challenges faced by global registration methods in LiDAR SLAM, Quatro++ introduces a robust global registration framework that incorporates ground segmentation.
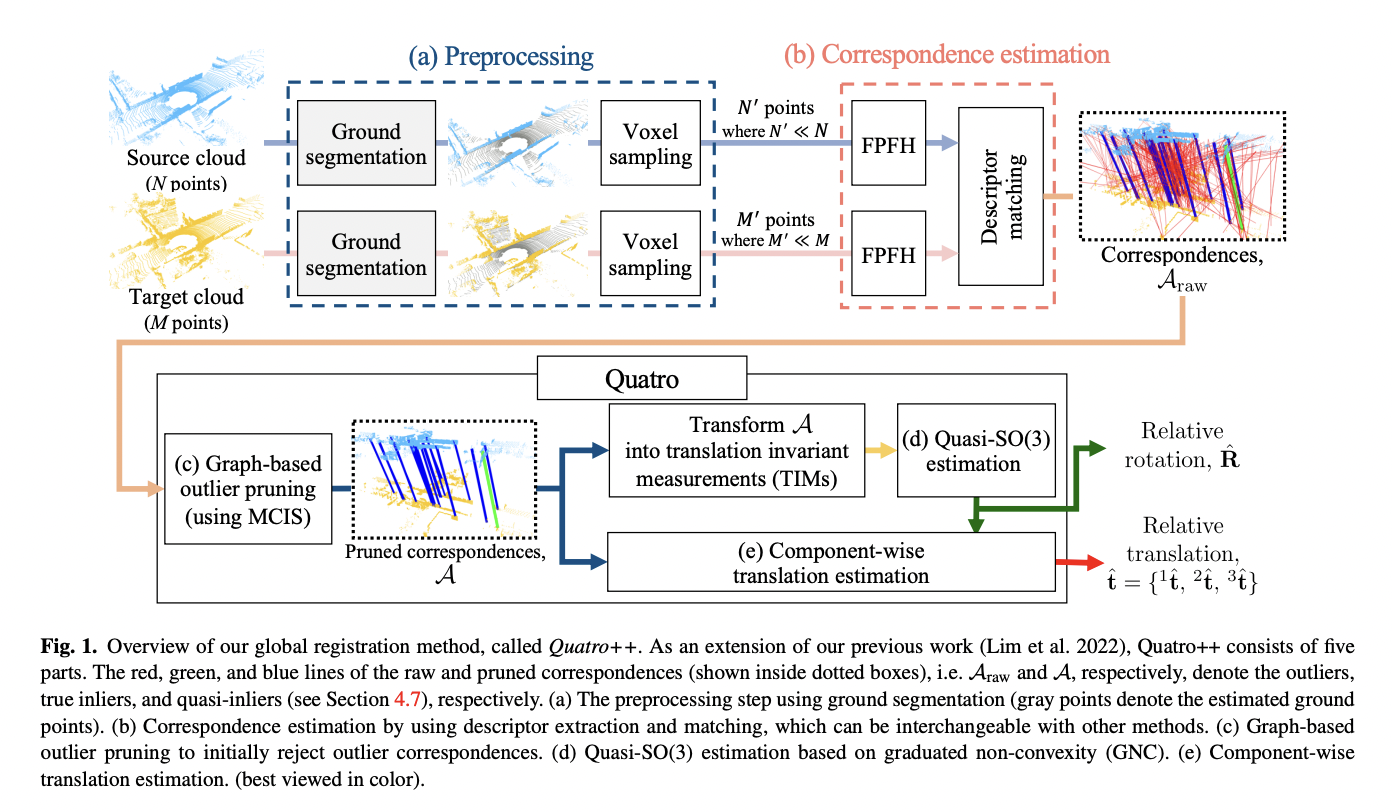
Quatro++ is a highly effective global registration framework for LiDAR SLAM that addresses issues of sparsity and degeneracy. It achieves this by utilizing ground segmentation to enhance robust registration, particularly for ground vehicles. One key feature that sets Quatro++ apart is its use of a quasi-SO estimation with ground segmentation. Experimental results on the KITTI dataset have demonstrated that Quatro++ can significantly enhance translation and rotation accuracy in loop closing, and it has also been shown to be applicable in INS systems by compensating for roll and pitch angles.
Quatro++ has demonstrated exceptional success in LiDAR SLAM, achieving a higher success rate by addressing sparsity and degeneracy issues. The framework’s ground segmentation has significantly improved success rates for ground vehicles in global registration, leading to more precise mapping and improved loop constraint quality. Quatro++ has outperformed RANSAC, FGR, and TEASER in loop-closing across diverse datasets and LiDAR sensor configurations. Its feasibility in INS systems, compensating for roll and pitch angles, highlights its versatility and applicability in various scenarios.
In conclusion, Quatro++ has successfully addressed the challenges of sparsity and degeneracy in LiDAR SLAM global registration, outperforming existing methods with higher success rates. The ground segmentation technique has significantly improved the robustness of registration and loop closing, resulting in better mapping precision. Although there are limitations in the front-end correspondence-based registration, the ground segmentation has notably increased success rates, particularly in distant cases, while reducing computational costs.
Check out the Paper and Project. All credit for this research goes to the researchers of this project. Also, don’t forget to join our 33k+ ML SubReddit, 41k+ Facebook Community, Discord Channel, and Email Newsletter, where we share the latest AI research news, cool AI projects, and more.
If you like our work, you will love our newsletter..
![]()
Sana Hassan, a consulting intern at Marktechpost and dual-degree student at IIT Madras, is passionate about applying technology and AI to address real-world challenges. With a keen interest in solving practical problems, he brings a fresh perspective to the intersection of AI and real-life solutions.
Credit: Source link
Comments are closed.