Meta AI Introduces ReSkin (A Touch-Sensing “Skin” For AI Tactile Perception Research) Along With A Python Sensor Library To Interface With ReSkin Sensors

Our sense of touch helps us gather information about our surroundings to accomplish our everyday tasks. Despite current advancements in AI research that incorporates vision and sound, touch remains a challenge. This is due to the fact that tactile-sensing data is hard to come by in the outdoors.
To help researchers advance their AI’s tactile-sensing skills rapidly and at scale, a recent Facebook research in collaboration with Carnegie Mellon University introduces ReSkin, a new open-source touch-sensing “skin.” ReSkin is a low-cost, adaptable, resilient, and replaceable long-term solution that takes advantage of machine learning and magnetic sensing developments. It uses a self-supervised learning technique to auto-calibrate the sensor, allowing it to be generalized and share data between sensors and systems.
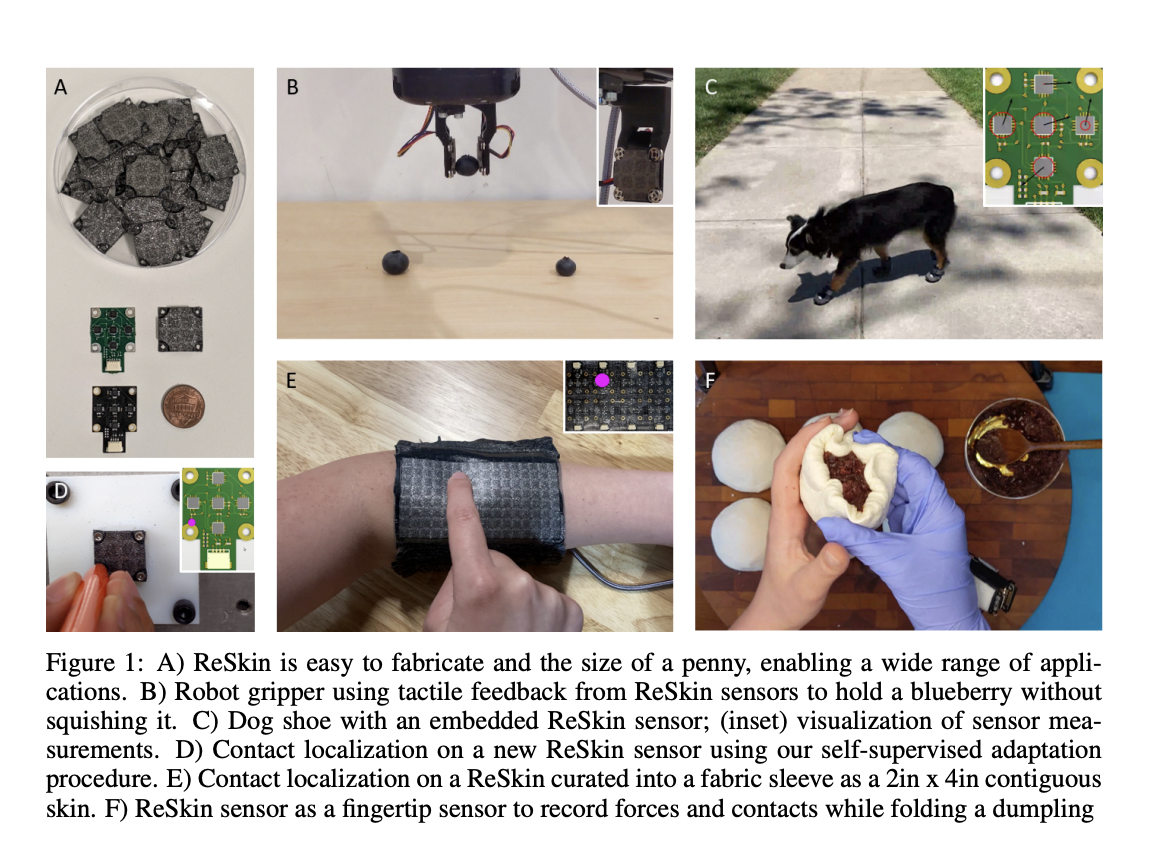
ReSkin is a low-cost product, with 100 units costing less than $6 each and larger volumes costing considerably less. It’s 2-3 mm thick and has a temporal resolution of up to 400Hz and a spatial resolution of 1 mm with 90% accuracy, allowing it to handle more than 50,000 interactions. These specs make it suitable for a wide range of form factors, including robot hands, arm sleeves, tactile gloves, and more. For quick manipulation tasks like slipping, tossing, catching, and clapping, ReSkin can also give high-frequency three-axis tactile signals. Furthermore, it can be easily stripped off and replaced when it wears out.
ReSkin is a flexible elastomer with embedded magnetic particles. That is why the surrounding magnetic signal changes when it deforms in any way. Nearby magnetometers can be used to measure these changes, and data-driven algorithms can interpret the data into information like contact location and applied force.
Due to manufacturing differences that occur naturally when employing soft materials, soft skins like ReSkin have traditionally been difficult to generalize. To identify its specific response, each sensor must go through an initial and complete calibration procedure. Furthermore, the qualities of soft materials fluctuate over time and vary depending on how they are used. As a result, the calibration method must automatically adjust to these changes. Early soft sensor research has often concentrated on a deep analysis of the sensing principle, but many companies neglect to look at long-term responses and develop automatic calibration techniques for non-experts.
ReSkin offers various advantages because of the following design improvements:
- ReSkin employs Magnetic signals that need electronics to be close by as they are based on proximity. This makes it more effective as compared to traditional soft sensors.
- Data from various sensors were used to train the model’s mapping function. By doing so, they were able to train the model on a wider range of data, allowing it to provide more effective and generalizable results.
- ReSkin uses improvements in self-supervised learning to fine-tune sensors with modest amounts of unlabeled data automatically. According to the researchers, a self-supervised model performed substantially better than those that were not. Rather than supplying ground-truth force labels, one can fine-tune the sensor’s calibration by using relative positions of unlabeled data.
Existing camera-based tactile sensors necessitate a minimum distance between the surface and the camera, resulting in significantly larger designs. ReSkin, on the other hand, can be used as a coating over both human and robot hands and arms.
The researchers demonstrate ReSkin’s use in various applications:
- In-hand Manipulation: ReSkin has useful tactile-sensing features for in-hand handling, such as training robots to use a key to open a door or grab fragile goods like grapes.
- Measuring tactile forces in the wild: The small, unobtrusive design of ReSkin makes it suitable for measuring tactile forces in the field. The researchers demonstrated this by inserting one magnetic skin and a flexible circuit board into the sole of a dog shoe. The sensor tracks the quantity and direction of applied force during the dog’s resting, strolling, and running using data acquired onboard.
- Human-object interactions: ReSkin can also be used to measure forces during natural human-object interactions, such as when we pick things up or push against them. Under a nitrile glove, they placed a skin and a rigid circuit board on a subject’s right-hand index finger. They measured sensor output while creating a red bean bun using data obtained onboard.
- Contact localization: ReSkin can be used for creating models that rely on knowing the location of an object. This can be done by scaling it up to cover greater surface areas for contact localization.
The team hopes that their research will aid the community in developing models that can power a wide range of tactile-sensing-based applications.
Project: https://reskin.dev/
Paper: https://openreview.net/pdf?id=87_OJU4sw3V
Github: https://github.com/raunaqbhirangi/reskin_sensor
Reference: https://ai.facebook.com/blog/reskin-a-versatile-replaceable-low-cost-skin-for-ai-research-on-tactile-perception/
Suggested
Credit: Source link
Comments are closed.