MIT researchers build swarms of assembling robots
|
Listen to this article  |
Researchers at the Massachusetts Institute of Technology (MIT) Center for Bits and Atoms (CBA) have created assembling robots that are made up of the same components they use to build structures, and that can move independently in large numbers to make those structures.
The latest research, published in Nature Communications Engineering, brings the researchers closer to creating a fully autonomous, self-replicating robot assembly system capable of assembling larger structures and planning its construction sequence.
MIT’s CBA has worked for years on similar research, like studies that have demonstrated that objects like a deformable plane wing and a functional racing car can be assembled from small, lightweight, identical pieces. This team’s research builds on that previous work and indicates that these small subunits of robots can be used to accomplish large-scale assemblies quickly.
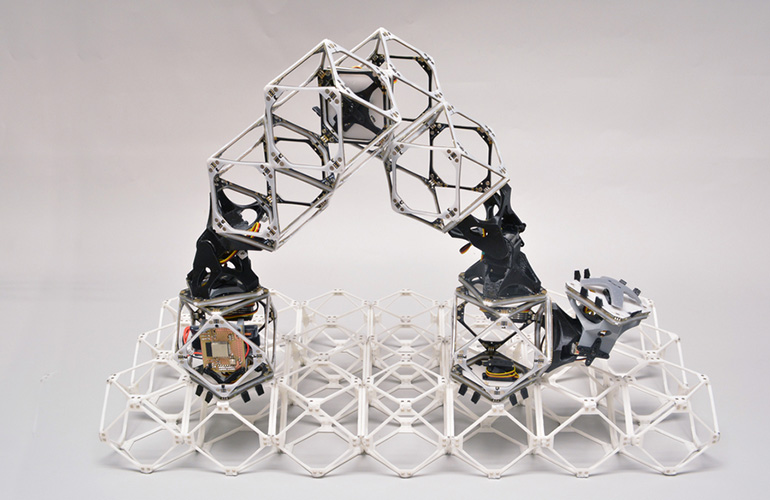
The system developed by the team includes large, usable structures made from tiny, identical subunits called voxels, which are the volumetric equivalent of a 2D pixel. MIT’s voxels are more complex than the ones used in previous studies, as they can carry both power and data from one unit to the next. The structure is assembled by robots that are also made up of a string of voxels joined end-to-end.
The voxel-robot can grab individual voxels using attachment points on its end. It then travels using inchworm-like movements to a position where it can attach the voxel to the structure and release it. But the robot doesn’t just decide how to build the structure, it can also decide to build more robots to help it build more quickly, or to make itself bigger so that it can travel across the structure faster.
This is where things get complicated for the researchers. While many papers have been published on robot path planning, that research doesn’t take into consideration a robot that could decide to make more robots.
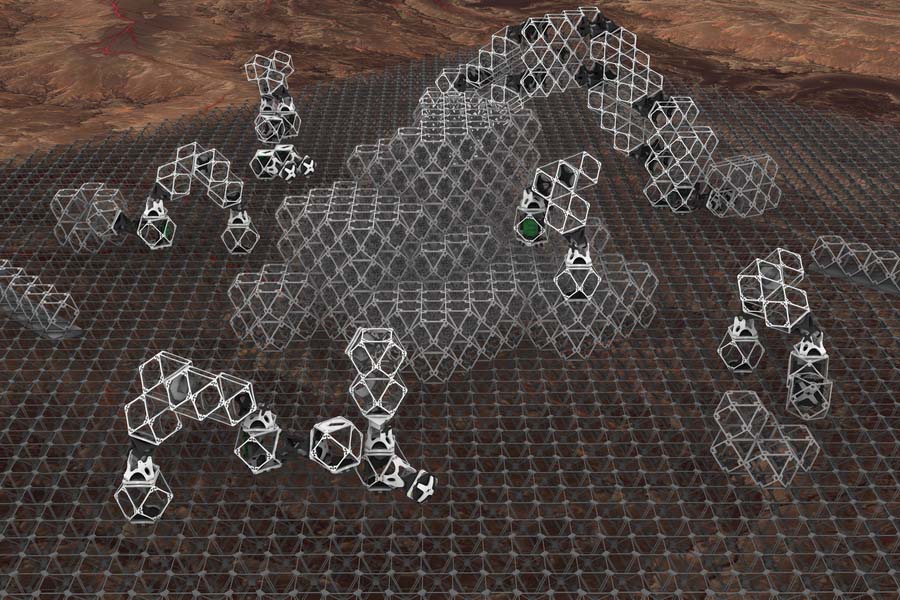
MIT’s research brings us closer to the possibility of building large structures from these assembly robots. | Source: MIT
The MIT team working on the research plans to develop stronger connectors for the robots in the future. Right now, the subunits aren’t strong enough to bear heavy loads, something that will be necessary for the many potential use cases they see for the technology. Some of those use cases include building 3D-printed houses and structures for coastal protection against erosion and sea level rise, as well as in the automotive and aviation industries.
The research team included MIT-CBA doctoral student Amira Abdel, Rahman, professor and CBA Director Neil Gershenfeld, MIT-CBA student Benjamin Jenett and Christopher Cameron, a researcher at the U.S. Army Research Lab, among others.
This kind of technology could be particularly helpful in space travel, where they could be sent to other planets to build structures before humans ever arrive. This is the vision of the COLMENA Project, or “hive” in English. This project involves sending a swarm of five self-organized robots, each weighing less than 60 grams and measuring just 12 centimeters in diameter, each equipped with a small solar panel.
The robots will autonomously navigate themselves to achieve electrical connectivity by joining their panels together to make a larger solar panel. The project will demonstrate how feasible it may be to build structures on planetary surfaces with robot swarms. During the mission, the robots will also take the first-ever lunar plasma temperature, electromagnetic and regolith particle size measurements.
The project, led by Dr. Gustavo Medina Tanco from the National Autonomous University of Mexico (UNAM), will launch the five micro-robots to the moon this year on board the Peregrine Lunar Lander.
Credit: Source link
Comments are closed.