NVIDIA Releases Developer Toolbox To Support AI Powered Robotics

Robots that can perceive and understand the world around them are a crucial part of our future. Nvidia’s AI-powered robotics tool, Isaac, is expanding support ROS, the Robot Operating System. NVIDIA has announced its newest endeavors to provide the ROS development community with a wide range of perception technologies. Developers that want to include cutting-edge computer vision and AI/ML capabilities into their ROS-based robotics systems will benefit from these projects since they will save development time and enhance performance.
Their recent announcement highlights are as follows:
- Highest-performing real-time stereo odometry solution available as a ROS package
- All NVIDIA inference DNNs available on NGC available as a ROS package with examples for image segmentation and pose estimation
- New synthetic data generation (SDG) workflow in NVIDIA Isaac Sim to create production-quality datasets at scale for Vision AI training
- NVIDIA Isaac Sim on Omniverse with out-of-the-box support for ROS goes GA with most developer-friendly release to date
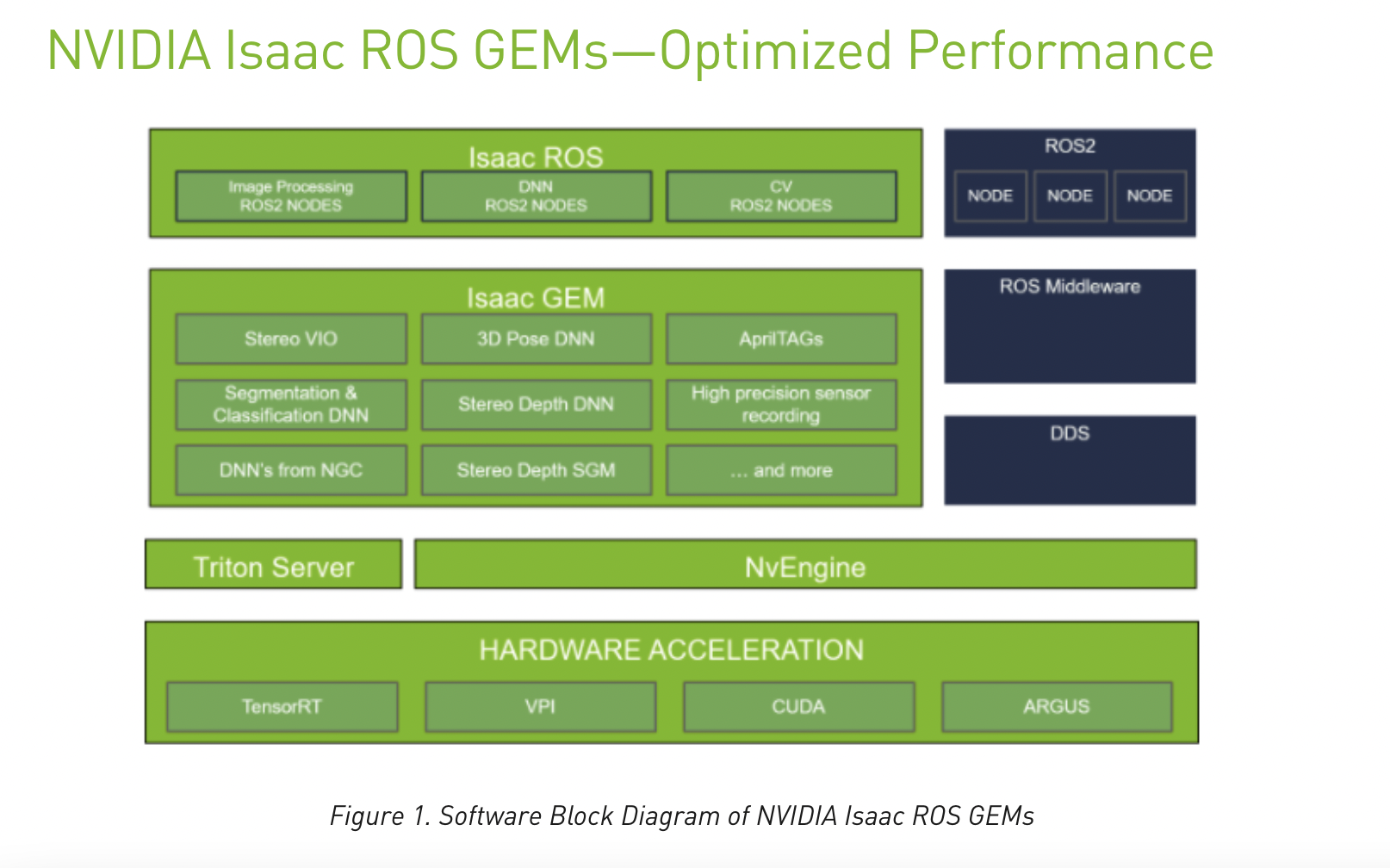
Isaac ROS GEM solution
The newly launched Isaac ROS GEM for Stereo Visual Odometry is a tool that will help autonomous vehicles keep track of where their camera(s) are relative to an initial position. From this broader perspective, it assists these machines in tracking their location concerning larger environments as well.
Availability of all Nvidia NGC DNN inference models to ROS developers
The DNN Inference GEM has enabled ROS developers to use any of Nvidia’s inference models available on NGC. Developers will also have access to their own model through TensorRT or Triton, in addition, they can take advantage of U-Net, which helps generate semantic segmentation masks from images while still being compatible with DOPE – an application that estimates three-dimensional poses.
Upcoming Release of Isaac SIM GA for Robotics with AI Capabilities
This upcoming release of Isaac SIM, scheduled for November 2021 comes with improvements in the UI and performance that make simulation-building much faster. The ROS bridge will be improved upon as well making it easier to developer experiences increased number samples from this robust toolkit through its new interface.
Suggested
Credit: Source link
Comments are closed.