Researchers Develop Collectives of Microrobots That Move in Desired Formations
A team of researchers from various institutions including the Max Planck Institute for Intelligent Systems (MPI-IS), Cornell University, and Shanghai Jiao Tong University have developed collectives of microrobots that can move in any desired formation.
The research was led by Gaurav Gardi and Prof. Metin Sitti from MPI-IS, Steven Ceron and Prof. Kirstin Peterson from Cornell, and Prof. Wendong Wang from Shanghai Jiao Tong University.
The research titled “Microrobot Collectives with Reconfigurable Morphologies, Behaviors, and Functions” was published in Nature Communications.
Reconfiguring the Miniature Particles
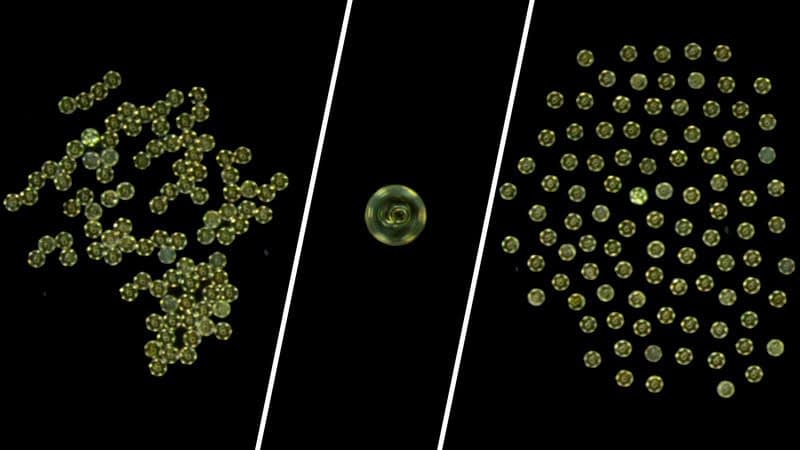
The miniature particles are able to reconfigure the swarm behavior very quickly. When floating on the surface of water, the microrobotic discs can move in circles, dance around, spread out like gas, bunch together, or form a straight line.
Each individual robot is a little bigger than the width of human hair, and they are 3D printed using a polymer before being coated with a thin top layer of cobalt. The metal gives the microrobots the ability to become miniature magnetics, while wire coils create a magnetic field when electricity flows through them. This magnetic field enables the particles to be precisely moved around a one-centimeter-wide pool of water.
An impressive example of this is when the robots form a line, which the researchers can then move around to “write” out letters in the water.
The development of swarm robotics is influenced by collective behavior and swarm patterns in nature, such as a flock of birds. The implementation of swarm behavior of robotics has exploded in popularity recently.
However, when the single particle is too tiny for computation, or a robot is only 300 micrometers wide, it cannot be programmed with an algorithm. In order to compensate for this, researchers must rely on three different forces. The first is magnetic force, which occurs when two magnets with opposite poles attract or two identical poles repel each other.
The second force is the fluid environment, or the water around the disks. This can be seen when particles swim in a swirl of water, which results in the water being displaced and the alteration of other surrounding particles. The speed of the swirl and the magnetitute determine how the particles interact.
The third force involves two particles floating next to each other, which often results in them drifting towards each other. The water surface is bent in a way that makes them come together.
Steering the Robots
The researchers used all three of these forces to create a collective and coordinated pattern of motion for dozens of microrobots as one system. The scientists can steer the robots through a parkour while displaying the formation that best suits a given obstacle. For example, the microrobots will line up in a single file to get through a narrow passage.
The robots can achieve several different locomotion modes and formations, which is achieved through external computation. An algorithm is programmed to create a magnetic field, either rotating or oscillating, and this triggers the desired movement of the robots.
Gaurav Gardi is a Ph.D. student in the Physical Intelligence department at MPI-IS. He is one of the lead authors of the study along with Steven Ceron.
“Depending on how we change the magnetic fields, the discs behave in a different way,” Gaurav Gardi says. “We are tuning one force and then another until we get the movement we want. If we rotate the magnetic field within the coils too vigorously, the force which is causing the water to move around is too strong and the discs move away from each other. If we rotate too slow, then the cheerio effect which attracts the particles is too strong. We need to find the balance between the three.”
Researchers in the field are also working to make these types of microrobotic collectives even smaller.
“Our vision is to develop a system that is even tinier made of particles only one micrometer small. These collectives could potentially go inside the human body and navigate through complex environments to deliver drugs, for instance, to block or unblock passages, or to stimulate a hard-to-reach area,” Gardi says.
Metin Sitti leads the Physical Intelligence Department.
“Robot collectives with robust transitions between locomotion behaviors are very rare. However, such versatile systems are advantageous to operate in complex environments. We are very happy we succeeded in developing such a robust and on-demand reconfigurable collective. We see our research as a blueprint for future biomedical applications, minimally invasive treatments, or environmental remediation,” Metin Sitti says.
Credit: Source link
Comments are closed.