Researchers From the Berlin Institute of Technology Introduce a New Model based on Deep Reinforcement Learning That Could Allow Mobile Robots to Follow and Guide People in Crowded Areas
With the ever-changing technology, we are witnessing advancements in technologies every day. One such advancement has come in the Assistance robots. These are primarily mobile robots meant for helping people in personal and public spaces. These robots could assist users in navigating unfamiliar areas by leading them to a specified destination or sharing crucial information with them.
Although the abilities of such robots have substantially increased over the last decade, the systems that have been applied in real-world scenarios so far are not yet capable of adequately guiding people inside congested places. In reality, teaching robots to follow a particular user while traversing a dynamic environment filled with randomly shifting obstacles is a difficult challenge.
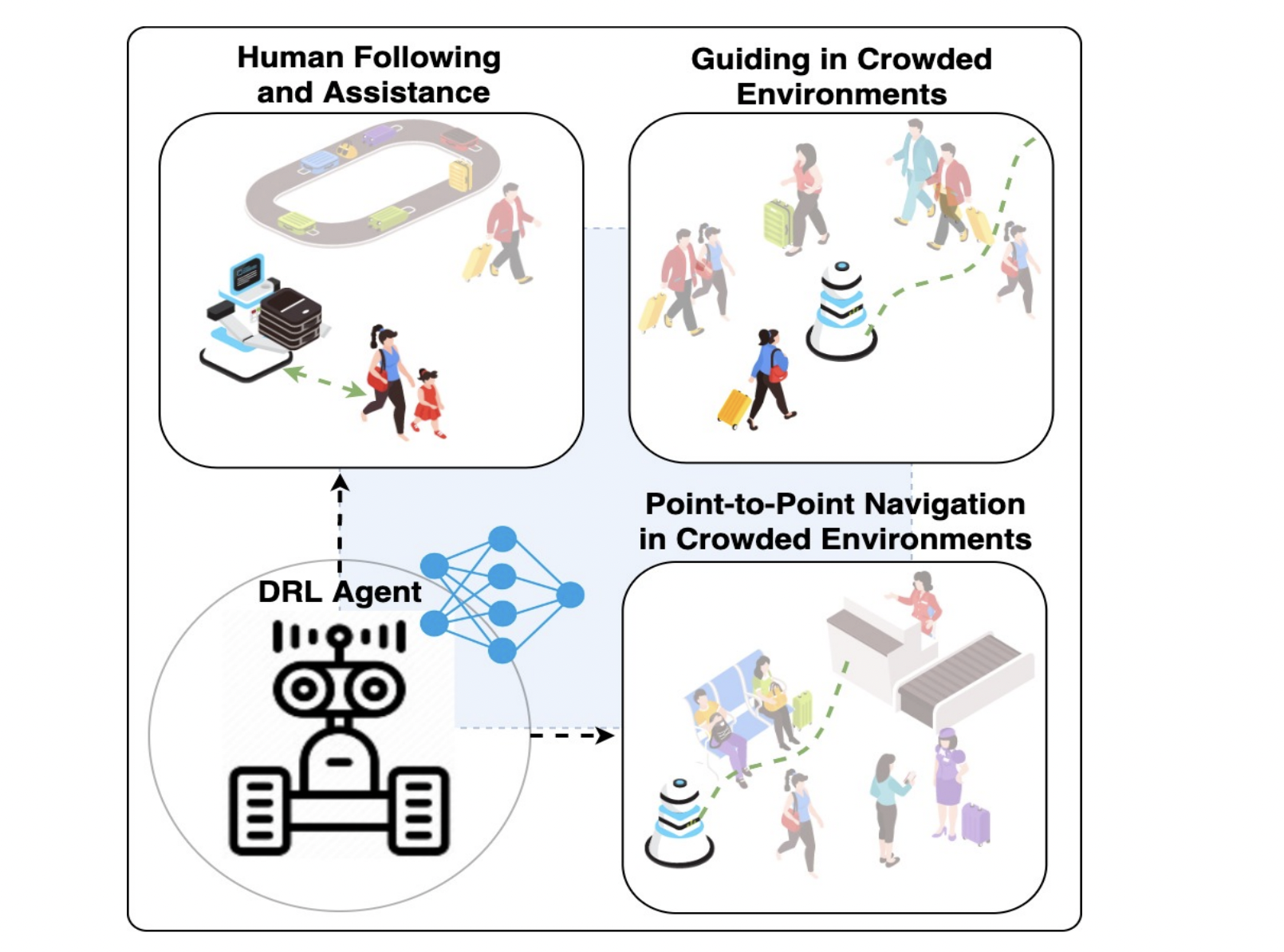
A team of researchers at the Berlin Institute of Technology has unveiled a novel deep reinforcement learning-based model that might enable mobile robots to accompany a particular user to a chosen place or follow them around while carrying their possessions, all while operating in a congested area. This concept might considerably improve the capability of robots in public.
The team said that the job of directing or following a person in busy places or carrying weight is still being worked upon as in such cases, apart from engaging cognitively, it also has to maneuver safely amidst the crowd.
The researchers added semantic information about human users’ moods and actions while training their Model, enabling their algorithm to make judgments about how to optimally help people while traveling at a comparable rate and without clashing with other people or adjacent barriers. This study proposed a deep reinforcement learning-based agent for guiding humans and following tasks in congested areas by combining semantic information to convey high-level knowledge to the agent.
The team ran multiple tests to examine the performance of their Model. The outcomes of these experiments were encouraging since the artificial assistant in the simulated environments could both advise and follow people, altering its velocity to match the user’s and avoiding adjacent impediments. After evaluating their suggested technique against a benchmark approach without semantic information exhibited better navigational safety and resilience. The assistant can also learn to adjust its behavior to people, dramatically enhancing the user experience.
While the study’s learning algorithm works well in simulated environments, its real test will be with robots in natural environments.
This study might open the way for developing more functional robot aides for airports, railway stations, and other congested public venues.
This Article is written as a summary article by Marktechpost Staff based on the paper 'Human-Following and -guiding in Crowded Environments using Semantic Deep-Reinforcement-Learning for Mobile Service Robots'. All Credit For This Research Goes To Researchers on This Project. Checkout the paper, github and reference article. Please Don't Forget To Join Our ML Subreddit
Credit: Source link
Comments are closed.