Stanford researchers create robotic boot that helps people walk
|
Listen to this article  |
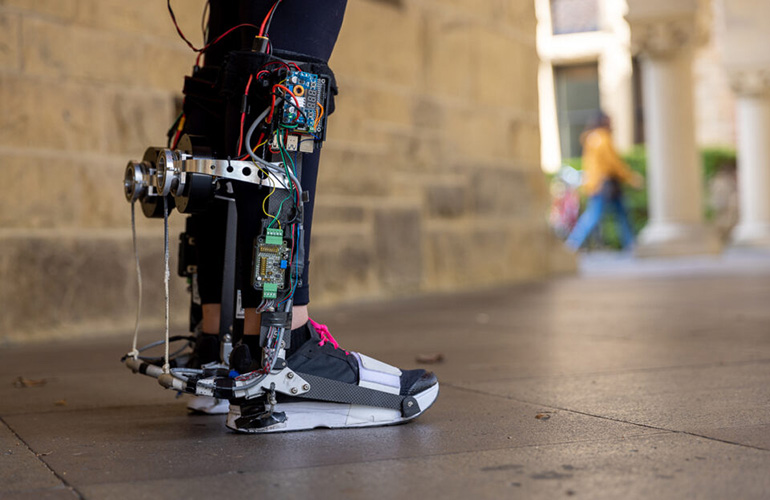
Engineers at Stanford University have created a boot-like robotic exoskeleton that can increase walking speed and reduce walking effort in the real world outside of the lab. The team’s research was published in Nature.
The exoskeleton gives users personalized walking assistance, allowing people to walk 9% faster and use 17% less energy per distance traveled. The energy savings and speed boost that the exoskeleton provides is equivalent to taking off a 30-pound backpack, according to the team.
The goal is to help people with mobility impairments, especially older people, to more easily move throughout the world, and the Standford team believes that its technology will be ready for commercialization in the next few years.
Using a motor that works with calf muscles, the robotic boot gives wearers an extra push with every step. The push is personalized using a machine learning-based model that was trained through years of work with emulators, or large, immobile and expensive lab setups that can rapidly test how to best assist people.
Students and volunteers were hooked up to the exoskeleton emulators while researchers collected motion and energy expenditure data. This data helped the research team to understand how the way a person walks with the exoskeleton relates to how much energy they’re using. The team gained more details about the relative benefits of different kinds of assistance offered by the emulator, and used the information to inform a machine-learning model that the real-world exoskeleton now uses to adapt to each wearer.
To adapt to an individual’s unique way of walking, the exoskeleton will provide a slightly different pattern of assistance each time the user walks. The exoskeleton then measures the resulting motion so that the machine learning model can determine how to better assist the user the next time they walk. In total, it takes the exoskeleton about an hour to customize its support to a new user.
Moving forward, the Stanford researchers hope to test what the exoskeleton can do for its target demographic, older adults and people who are experiencing mobility decline from disability. The team also wants to plan design variations that target improving balance and reducing joint pain, and work with commercial partners to turn the device into a product.
Credit: Source link
Comments are closed.