This AI Paper Introduces RTMO: A Breakthrough in Real-Time Multi-Person Pose Estimation Using Dual 1-D Heatmaps
The field of pose estimation, which involves determining the position and orientation of an object in space, is a rapidly evolving area, with researchers continuously developing new methods to improve its accuracy and performance. Researchers from three highly regarded institutions – Tsinghua Shenzhen International Graduate School, Shanghai AI Laboratory, and Nanyang Technological University – have recently contributed to the field by developing a new RTMO framework. The framework has the potential to enhance the accuracy and efficiency of pose estimation and could have a significant impact on various applications, including robotics, augmented reality, and virtual reality.
RTMO is a one-stage pose estimation framework designed to overcome the trade-off between accuracy and real-time performance in existing methods. RTMO integrates coordinate classification and dense prediction models, outperforming other one-stage pose estimators by achieving comparable accuracy to top-down approaches while maintaining high speed.
Real-time multi-person pose estimation is a challenge in computer vision, with existing methods needing help to balance speed and accuracy. Current approaches, either top-down or one-stage, have limitations regarding inference time or accuracy. RTMO is a one-stage pose estimation framework that combines coordinate classification with the YOLO architecture. Overcoming challenges through a dynamic coordinate classifier and tailored loss functions, RTMO outperforms existing one-stage pose estimators, achieving higher Average Precision on COCO while maintaining real-time performance.
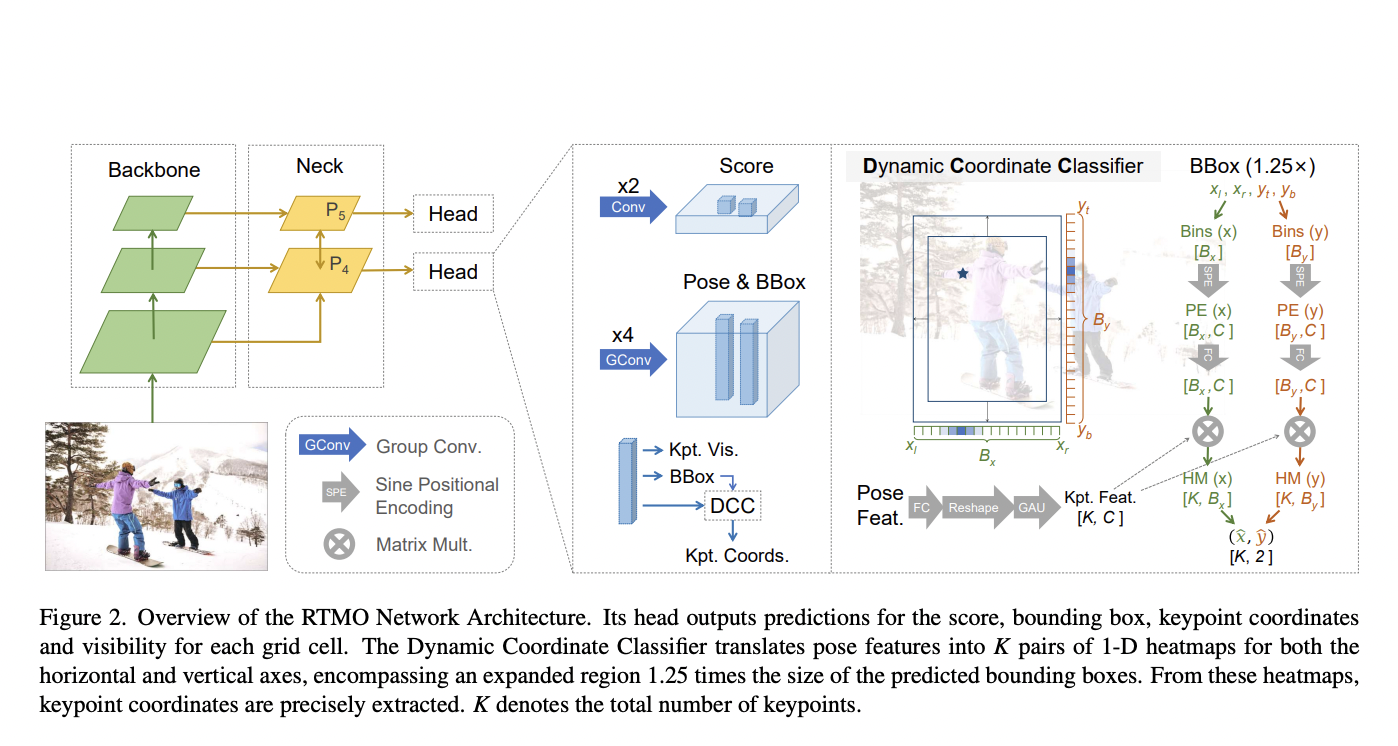
The study presents a real-time multi-person pose estimation framework, RTMO, employing a YOLO-like architecture with CSPDarknet as the backbone and a Hybrid Encoder. Dual convolution blocks generate scores and pose features at each spatial level. The method addresses incompatibilities between coordinate classification and dense prediction models by employing a dynamic coordinate classifier and a tailored loss function for heatmap learning. Dynamic Bin Encoding is utilized for creating bin-specific representations, and Gaussian label smoothing with cross-entropy loss is employed for classification tasks.
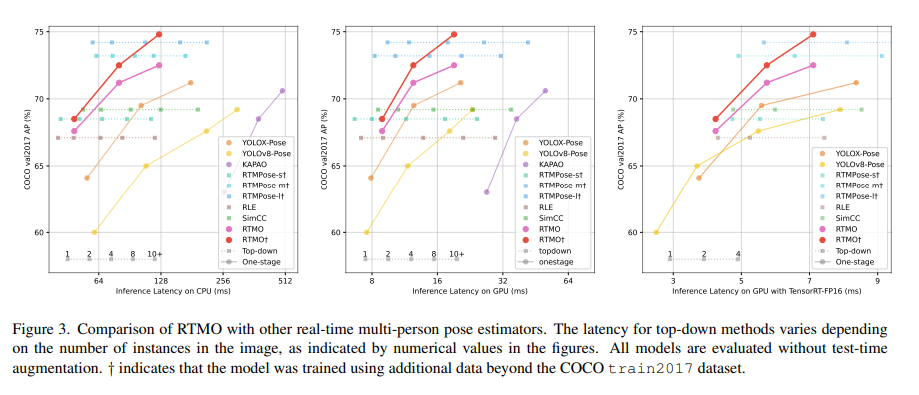
RTMO, a one-stage pose estimation framework, excels in multi-person pose estimation by achieving high accuracy and real-time performance. Outperforming cutting-edge one-stage pose estimators, it attains a 1.1% higher Average Precision on COCO while operating about nine times faster with the same backbone. The largest model, RTMO-l, achieves 74.8% AP on COCO val2017 and runs 141 frames per second on a single V100 GPU. Across different scenarios, the RTMO series outperforms comparable lightweight one-stage methods in performance and speed, demonstrating efficiency and accuracy. With additional training data, RTMO-l achieves a state-of-the-art 81.7 Average Precision. The framework generates spatially accurate heatmaps, facilitating robust and context-aware predictions for each key point.
In conclusion, the study can be summarized in a few points mentioned:
- RTMO is a pose estimation framework with high accuracy and real-time performance.
- It seamlessly integrates coordinate classification within the YOLO architecture.
- RTMO employs an innovative coordinate classification technique using coordinate bins for precise keypoint localization.
- It outperforms cutting-edge one-stage pose estimators and achieves higher Average Precision on COCO while being significantly faster.
- RTMO excels in challenging multi-person scenarios, generating spatially accurate heatmaps for robust, context-aware predictions.
- RTMO balances performance and speed among existing top-down and one-stage multi-person pose estimation methods.
Check out the Paper. All credit for this research goes to the researchers of this project. Also, don’t forget to join our 34k+ ML SubReddit, 41k+ Facebook Community, Discord Channel, and Email Newsletter, where we share the latest AI research news, cool AI projects, and more.
If you like our work, you will love our newsletter..
![]()
Sana Hassan, a consulting intern at Marktechpost and dual-degree student at IIT Madras, is passionate about applying technology and AI to address real-world challenges. With a keen interest in solving practical problems, he brings a fresh perspective to the intersection of AI and real-life solutions.
Credit: Source link
Comments are closed.