This AI Paper Proposes COPlanner: A Machine Learning-based Plug-and-Play Framework that can be Applied to any Dyna-Style Model-based Methods
One of the critical challenges in model-based reinforcement learning (MBRL) is managing imperfect dynamics models. This limitation of MBRL becomes particularly evident in complex environments, where the ability to forecast accurate models is crucial yet difficult, often leading to suboptimal policy learning. The challenge is achieving accurate predictions and ensuring these models can adapt and perform effectively in varied, unpredictable scenarios. Therefore, a critical need arises for innovation in MBRL methodologies to better address and compensate for these model inaccuracies.
Recent research in MBRL has explored various methods to address dynamic model inaccuracies. Plan to Predict (P2P) focuses on learning an uncertainty-foreseeing model to avoid uncertain regions during rollouts. Branched and bidirectional rollouts utilize shorter horizons to mitigate early-stage model errors, though this can limit planning capabilities. Notably, Model-Ensemble Exploration and Exploitation (MEEE) expands the dynamics model while minimizing error impacts during rollouts by leveraging uncertainty in loss calculation, presenting a significant advancement in the field.
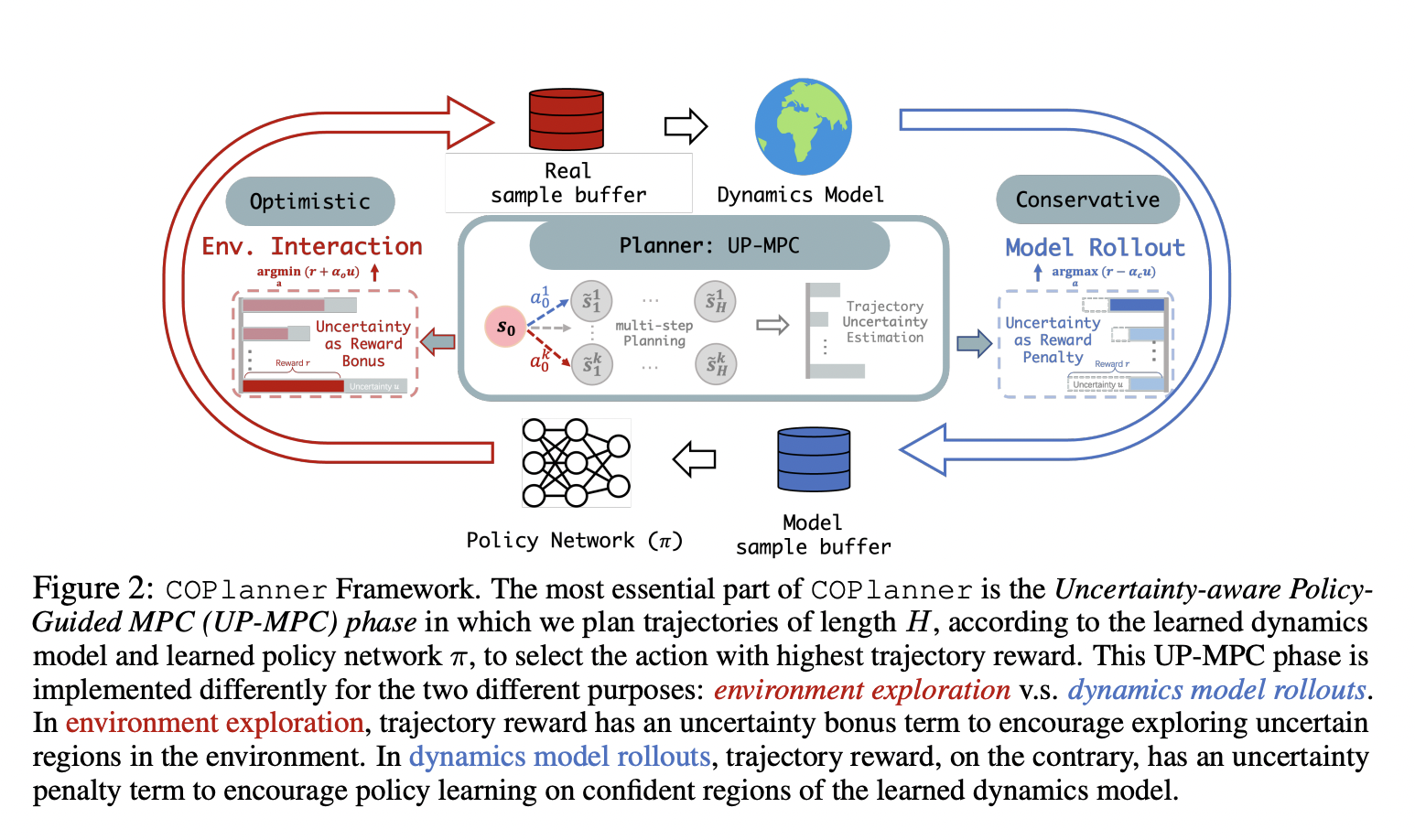
Combining their efforts with JPMorgan AI Research and Shanghai Qi Zhi Institute, researchers from the University of Maryland and Tsinghua University have introduced COPlanner, a novel approach within the MBRL paradigm. It utilizes an uncertainty-aware policy-guided model predictive control (UP-MPC). This component is essential for estimating uncertainties and selecting appropriate actions. The methodology includes a detailed ablation study on the Hopper-hop task in visual control DMC, focusing on different uncertainty estimation methods and assessing their computational time consumption.
A key feature of COPlanner is its comparative analysis with existing methods. The paper visualizes trajectories from real environment evaluations, highlighting the performance differences between DreamerV3 and COPlanner-DreamerV3. Specifically, it focuses on tasks like Hopper-hop and Quadruped-walk, providing a clear picture of COPlanner’s enhancements over standard approaches. This visual comparison underscores COPlanner’s advancements in handling tasks with varying complexities, demonstrating its practical applications in model-based reinforcement learning.
The research demonstrates that COPlanner significantly enhances sample efficiency and asymptotic performance in proprioceptive and visual continuous control tasks. This improvement is particularly notable in challenging visual tasks, where optimistic exploration and conservative rollouts yield the best outcomes. Results have demonstrated how model prediction error and rollout uncertainty change as the environment step increases. The study also presents the ablation results on different hyperparameters of COPlanner, such as optimistic rate, conservative rate, action candidate number, and planning horizon.
The COPlanner framework marks a substantial advancement in the field of MBRL. Its innovative integration of conservative planning and optimistic exploration addresses a fundamental challenge in the discipline. This research contributes to the theoretical understanding of MBRL and offers a pragmatic solution with potential applications in various real-world scenarios, underscoring its significance in advancing the field.
Check out the Paper and Project. All credit for this research goes to the researchers of this project. Also, don’t forget to follow us on Twitter. Join our 36k+ ML SubReddit, 41k+ Facebook Community, Discord Channel, and LinkedIn Group.
If you like our work, you will love our newsletter..
Don’t Forget to join our Telegram Channel
![]()
Nikhil is an intern consultant at Marktechpost. He is pursuing an integrated dual degree in Materials at the Indian Institute of Technology, Kharagpur. Nikhil is an AI/ML enthusiast who is always researching applications in fields like biomaterials and biomedical science. With a strong background in Material Science, he is exploring new advancements and creating opportunities to contribute.
Credit: Source link
Comments are closed.