This AI Research Presents Neural A*: A Novel Data-Driven Search Method for Path Planning Problems
Path planning identifies a cost-effective and valid path from an initial point to a target point within an environmental map. Search-based planning methods, which include the well-known A* search, are widely employed in addressing path-planning challenges. These techniques have found application in various domains, including autonomous vehicle navigation and robot arm manipulation.
Recent studies have highlighted the significant benefits of data-driven path planning in two specific scenarios.
- The first scenario involves the more efficient discovery of near-optimal paths in point-to-point shortest-path search problems compared to traditional heuristic planners.
- The second scenario pertains to enabling path planning using raw image inputs. This task is challenging for classical planners unless there is access to semantic pixel-wise labeling of the environment.
In this research, the authors have redefined the conventional A* search algorithm differently and combined it with a convolutional encoder to create a fully trainable end-to-end neural network planner. This approach, known as Neural A*, addresses path planning problems by transforming a given problem instance into a guidance map and subsequently conducting a differentiable A* search based on that map.

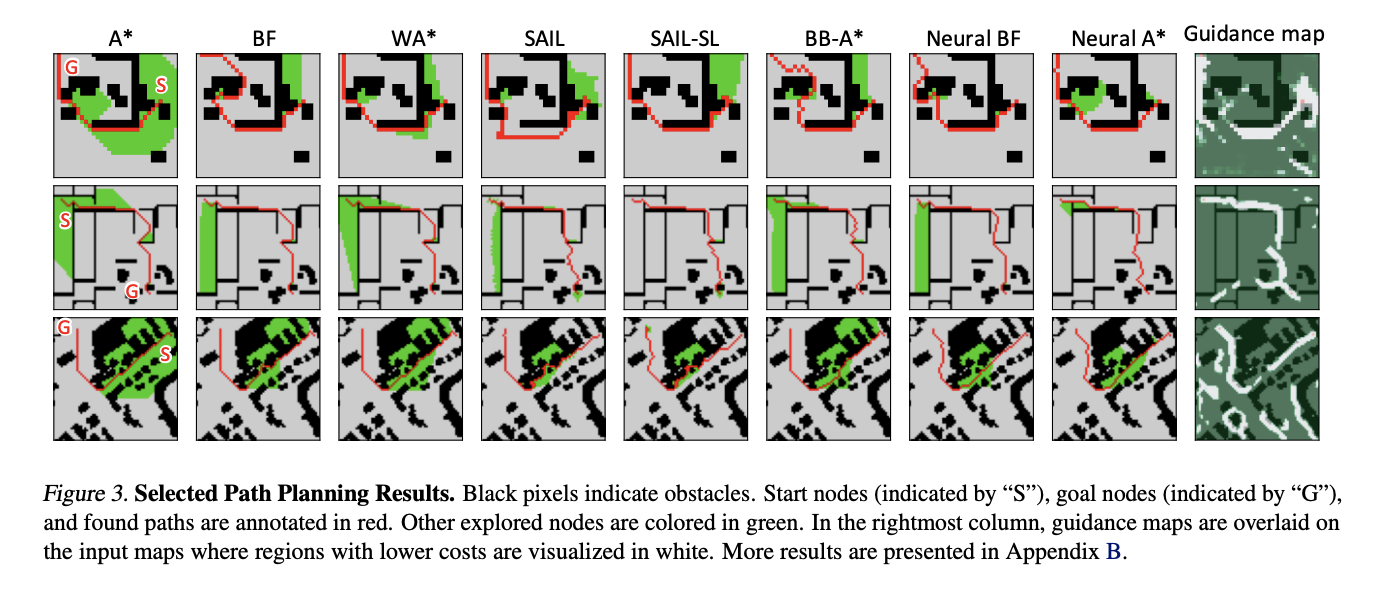
The above image demonstrates two Scenarios of Path Planning with Neural A*.
- Point-to-point shortest path search: finding a near-optimal path (red) with fewer node explorations (green) for an input map.
- Path planning on raw image inputs: accurately predicting a human trajectory (red) on a natural image.
Through the process of learning to align search outcomes with expert-provided ground truth paths, Neural A* can generate paths that accurately and efficiently adhere to the ground truth.
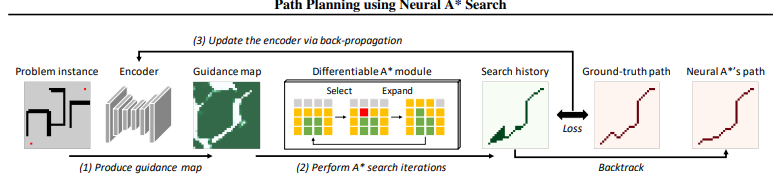
This figure shows the schematic diagram of Neural A*:
(1) A path-planning problem instance is fed to the encoder to produce a guidance map.
(2) The differentiable A* module performs a point-to-point shortest path search with the guidance map and outputs a search history and a resulting path.
(3) A loss between the search history and the ground-truth path is back-propagated to train the encoder.
Comprehensive experimentation results have shown that Neural A* surpasses state-of-the-art data-driven planners, achieving a favorable balance between search optimality and efficiency. Furthermore, Neural A* has demonstrated the capability to predict realistic human trajectories by directly applying search-based planning to natural image inputs.
Check out the Paper, Project, and Github. All Credit For This Research Goes To the Researchers on This Project. Also, don’t forget to join our 31k+ ML SubReddit, 40k+ Facebook Community, Discord Channel, and Email Newsletter, where we share the latest AI research news, cool AI projects, and more.
If you like our work, you will love our newsletter..
We are also on WhatsApp. Join our AI Channel on Whatsapp..
![]()
Janhavi Lande, is an Engineering Physics graduate from IIT Guwahati, class of 2023. She is an upcoming data scientist and has been working in the world of ml/ai research for the past two years. She is most fascinated by this ever changing world and its constant demand of humans to keep up with it. In her pastime she enjoys traveling, reading and writing poems.
Credit: Source link
Comments are closed.