Watch a quadruped walk along a balance beam
|
Listen to this article  |
From MIT teaching a quadruped to dribble a soccer ball, to Carnegie Mellon and UC Berkeley researchers teaching them to manipulate objects with their legs, to Ghost Robotics’ Vision 60 quadruped’s latest swimming capabilities, quadrupeds have been taking steps lately towards being able to go anywhere humans can.
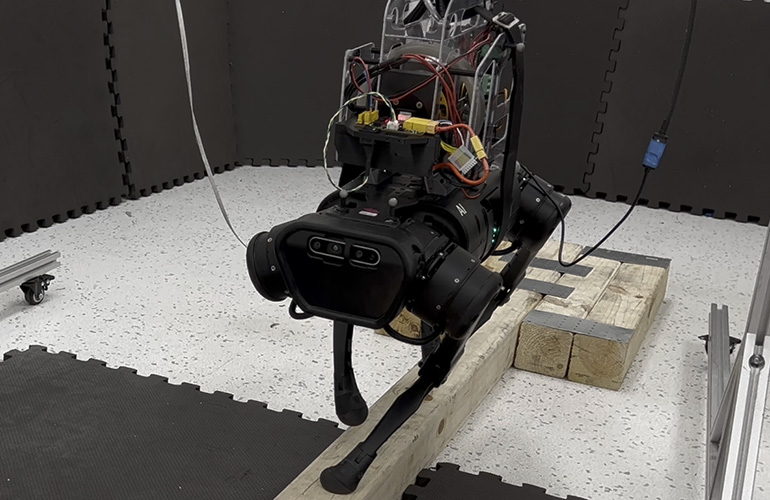
Now, researchers at Carnegie Mellon University’s Robotics Institute (RI) have designed a system that can make an off-the-shelf quadruped robot nimble enough to walk a narrow balance beam. The team used hardware that is often used to control satellites in space to help offset existing constraints in the quadruped’s design to improve its balancing capabilities.
Typically, quadrupeds need to have at least three of their rounded feet on the ground to keep their balance, making walking through rough terrain, or on a balance beam, very difficult. Current control methods also decouple a quadruped’s body and legs, so they don’t communicate with each other to coordinate their movements.
To combat these restraints, the team employed a reaction wheel actuator (RWA) system that mounts to the back of a quadruped robot. RWAs are traditionally used in the aerospace industry to perform altitude control on satellites by manipulating the angular momentum of the spacecraft. In this case, the RWA, along with a novel control technique, allows the robot to balance independently of the positions of its feet.
The Carnegie Mellon team’s prototype had two RWAs mounted on a commercial Unitree A1 robot, one on the pitch axis and one on the roll axis, to provide control over the robot’s angular motion.
With the RWA, it doesn’t matter if the robot’s legs are in contact with the ground or not, because the hardware doesn’t change the robot’s mass distribution and doesn’t come with the joint limitations of a tail or spine, which many quadrupedal animals use to achieve this same balance. Without these constraints, the hardware can be modeled like a gyrostat, an idealized model of a spacecraft, and integrated into a standard model predictive control algorithm.
The team tested it system in simulation and on hardware. In simulation, they dropped the robot upside down from nearly half a meter, mimicking the falling-cat problem, and the RWAs enabled the robot to reorient itself mid-air and land on its feet, just like cats do. On hardware, the robot was able to recover from disturbances with an experiment where the robot walked along a 6-cm-wide balance beam.
Credit: Source link
Comments are closed.