What Type of Robot Should You Use?
|
Listen to this article  |
Breaking down the different types of robots and how they can work for you
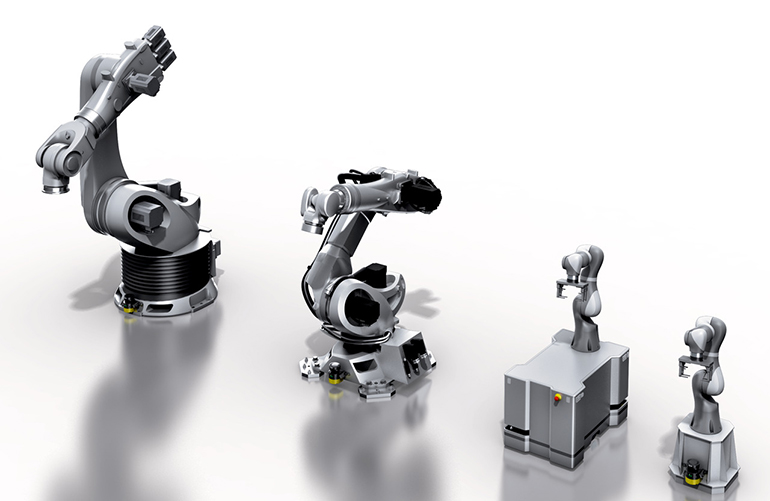
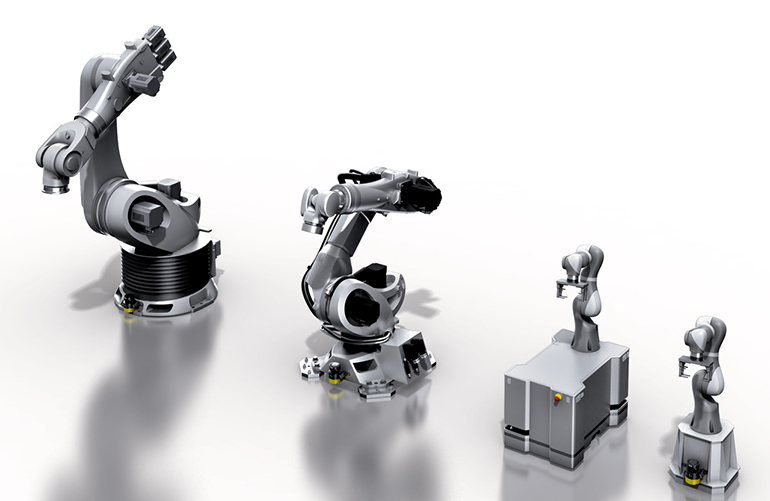
Manufacturers use a variety of robots in their operations, each with its own specific capabilities and functions. We’re discussing some of the most common types of robots used in manufacturing, and which one may work best for your application.
Articulated Robots
Articulated robots are a type of industrial robot that have a series of joints, allowing them to move like a human arm. These joints are typically rotary joints that can move in a range of motion, providing flexibility and maneuverability for the robot.
The arm of an articulated robot typically consists of several segments, with each segment attached to a joint. The segments can be straight or curved, and the number of segments and joints can vary depending on the specific robot model and application. The end of the arm typically has a tool or end effector attached, such as a gripper or dedicated tool for a specific operation.
Articulated robots are versatile and can perform a wide range of tasks, such as welding, material handling, assembly, and inspection. They can work in tight spaces and can reach over obstacles, making them ideal for complex manufacturing operations. They also provide more freedom than any other robot type. Their ability to cover several movements makes them more adaptable to changes in the production process or workpieces.
Articulated robots can usually do high payloads, with the highest payload capacity currently at 2300kg with a FANUC robot. They can also work at high speeds with a high degree of precision, improving production efficiency and quality. However, other types of robots typically perform at a higher speed than an articulated robot does.
SCARA Robots
SCARA robots are a type of industrial robot that have a similar arm structure to articulated robots, but with a fixed base. The acronym SCARA stands for Selective Compliance Assembly Robot Arm.
The arm of a SCARA robot consists of two parallel joints that allow the arm to move in a horizontal plane, with a third joint that allows the arm to move up and down. This design provides the robot with a greater level of rigidity and accuracy, making it well-suited for applications that require precise movements in a horizontal plane, such as pick-and-place operations.
SCARA robots are often used for assembly, inspection, and packaging applications, where a high level of precision and repeatability is required. They can also work at high speeds, making them ideal for high-volume manufacturing operations.
These are a popular choice for manufacturing applications where precision and speed are essential. They offer a high level of accuracy, repeatability, and flexibility, making them a valuable tool for manufacturers seeking to improve their production efficiency and output.
Cartesian Robots
Cartesian robots, also known as gantry robots or linear robots, are a type of industrial robot that move in a rectangular coordinate system, creating a three-dimensional cubic envelope of space to work within. The name “Cartesian” comes from the Cartesian coordinate system used to describe positions in space.
These typically consist of a stationary base and an overhead gantry that moves along the X and Y axes. The Z axis is provided by a vertical column that moves up and down, often with a tool or end effector attached. Cartesian robots are known for their ability to provide precise and repeatable movements, making them well-suited for applications that require high levels of accuracy.
Most often used for pick-and-place operations, material handling, and assembly applications, they can work at high speeds and can handle heavy loads, making them ideal for high-volume manufacturing operations. They can also be easily customized to fit specific manufacturing needs, such as the addition of vision systems for inspection or guidance.
Delta Robots
These are most often used for pick-and-place operations, packaging, and assembly applications, where a high degree of precision and speed is required. They can work at very high speeds, often exceeding 200 cycles per minute, and can handle small, lightweight items with great accuracy.
They are commonly used in the food and pharmaceutical industries, where hygiene is critical. Delta robots are also ideal for clean room environments, as they have a sealed design that prevents contamination from entering the workspace.
Collaborative Robots
Collaborative robots, also known as cobots, are a type of robot designed for direct interaction with a human within a defined collaborative workspace. Unlike traditional industrial robots, which typically operate behind safety barriers, cobots are designed to operate in close proximity to human workers without posing a safety risk.
Equipped with a range of safety features, such as sensors and cameras, cobots can detect the presence of humans and adjust movements accordingly. They are also designed to be lightweight and easy to program, allowing them to be quickly deployed in a variety of manufacturing environments.
They are most often used for tasks that are repetitive, dangerous, or difficult for human workers, such as material handling, assembly, and inspection. They can be used to perform a wide range of manufacturing tasks, including welding, painting, and packaging.
Cobots offer several advantages over traditional industrial robots. They are more flexible and can be easily reprogrammed to perform different tasks, making them ideal for small-batch manufacturing operations. They are also more affordable than traditional robots, making them accessible to a wider range of manufacturers.
Industrial Mobile Robots (IMR)
Mobile robots are equipped with a variety of sensors and systems that allow them to perceive their environment and make decisions based on that information. For example, they may use cameras, LiDAR or ultrasound sensors to detect obstacles or map their surroundings.
In manufacturing, mobile robots are often used for logistics tasks, such as moving materials or products between workstations or to storage locations. They can also be used for quality control and inspection tasks, where they can move around a workspace to inspect products or equipment.
In general, IMRs offer several advantages over stationary robots as they can cover larger areas and work in environments that may not be accessible to stationary robots. They can also be reprogrammed or reconfigured easily, making them more versatile and adaptable to changing manufacturing needs.
Sponsored content by SICK
Credit: Source link
Comments are closed.